Publications #
Evaluation of ground stiffness using surface accelerometers during vibratory compaction
, , , , , , , ,
Paper
, , , , , , , ,
Paper
@article{tamaishi2026evaluation,
title = {Evaluation of ground stiffness using surface accelerometers during vibratory compaction},
author = {Yusuke Tamaishi and Kazuto Nakashima and Kentaro Fukuda and Ryuichi Maeda and Kohei Matsumoto and Hisatoshi Taniguchi and Yasuhiro Mitani and Keiji Nagatani and Ryo Kurazume},
journal = {SICE Journal of Control, Measurement, and System Integration},
year = {2026},
}SICE Journal of Control, Measurement, and System Integration (JCMSI),
2026

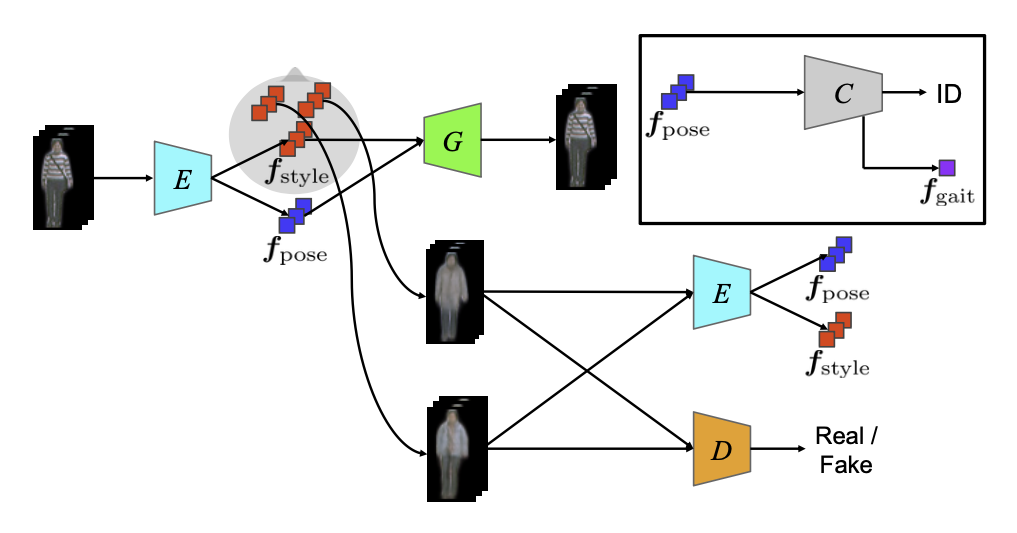
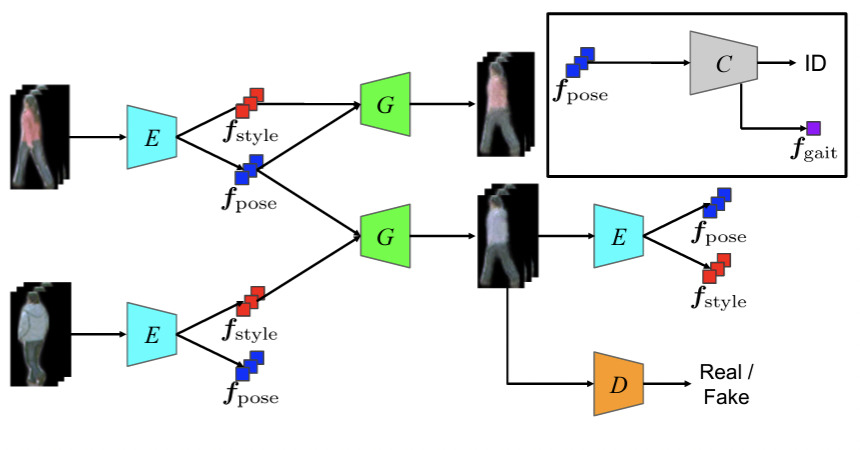
RGB-based Gait Recognition with Disentangled Gait Feature Swapping
, , , ,
Paper
, , , ,
Paper
@article{yoshino2024rgb-based,
title = {RGB-based Gait Recognition with Disentangled Gait Feature Swapping},
author = {Koki Yoshino and Kazuto Nakashima and Jeongho Ahn and Yumi Iwashita and Ryo Kurazume},
journal = {IEEE Access},
year = {2024},
}IEEE Access,
2024
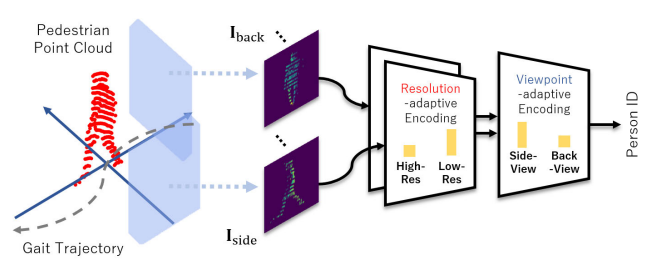
Learning Viewpoint-Invariant Features for LiDAR-Based Gait Recognition
, , , ,
Paper
, , , ,
Paper
@article{ahn2023learning,
title = {Learning Viewpoint-Invariant Features for LiDAR-Based Gait Recognition},
author = {Jeongho Ahn and Kazuto Nakashima and Koki Yoshino and Yumi Iwashita and Ryo Kurazume},
journal = {IEEE Access},
year = {2023},
}IEEE Access,
2023
Lifelogging Caption Generation via Fourth-Person Vision in a Human-Robot Symbiotic Environment
, ,
Paper
, ,
Paper
@article{nakashima2020lifelogging,
title = {Lifelogging Caption Generation via Fourth-Person Vision in a Human-Robot Symbiotic Environment},
author = {Kazuto Nakashima and Yumi Iwashita and Ryo Kurazume},
journal = {ROBOMECH Journal},
year = {2020},
}ROBOMECH Journal,
2020
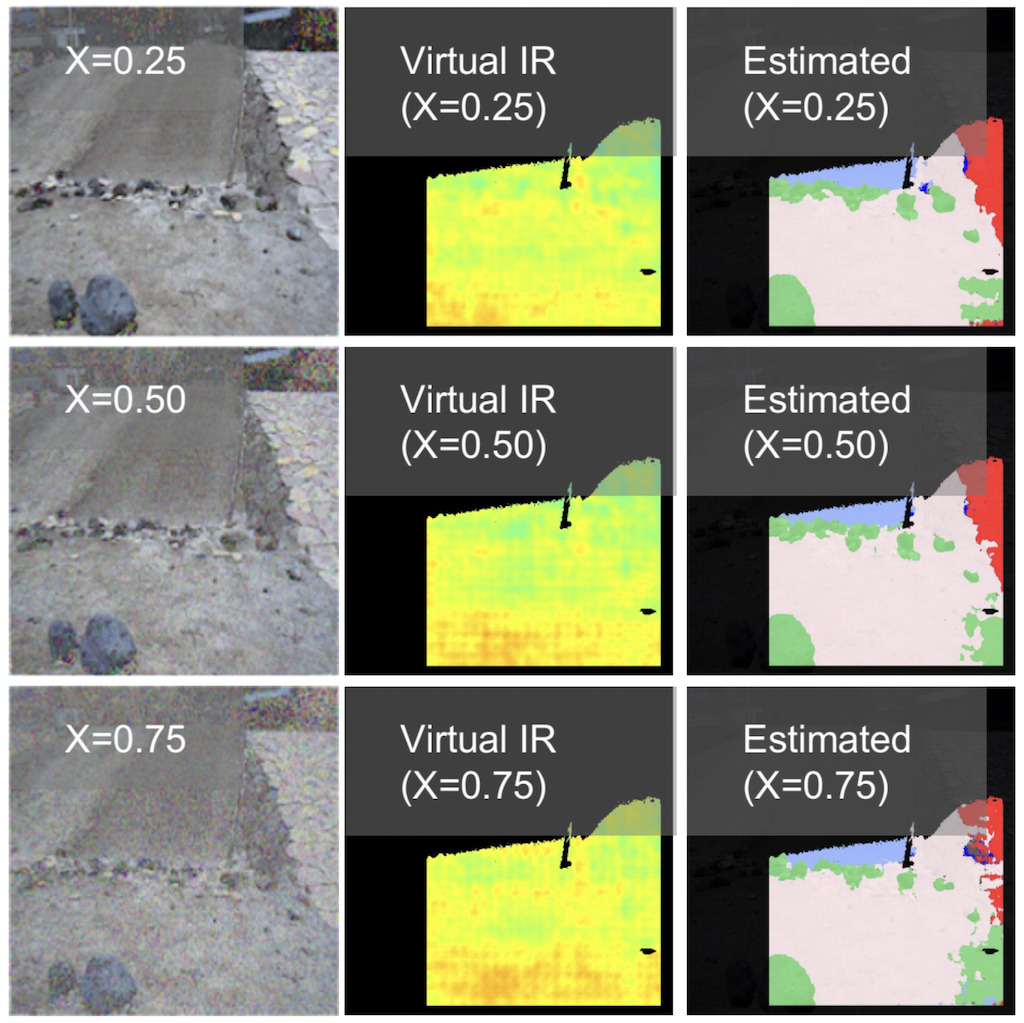
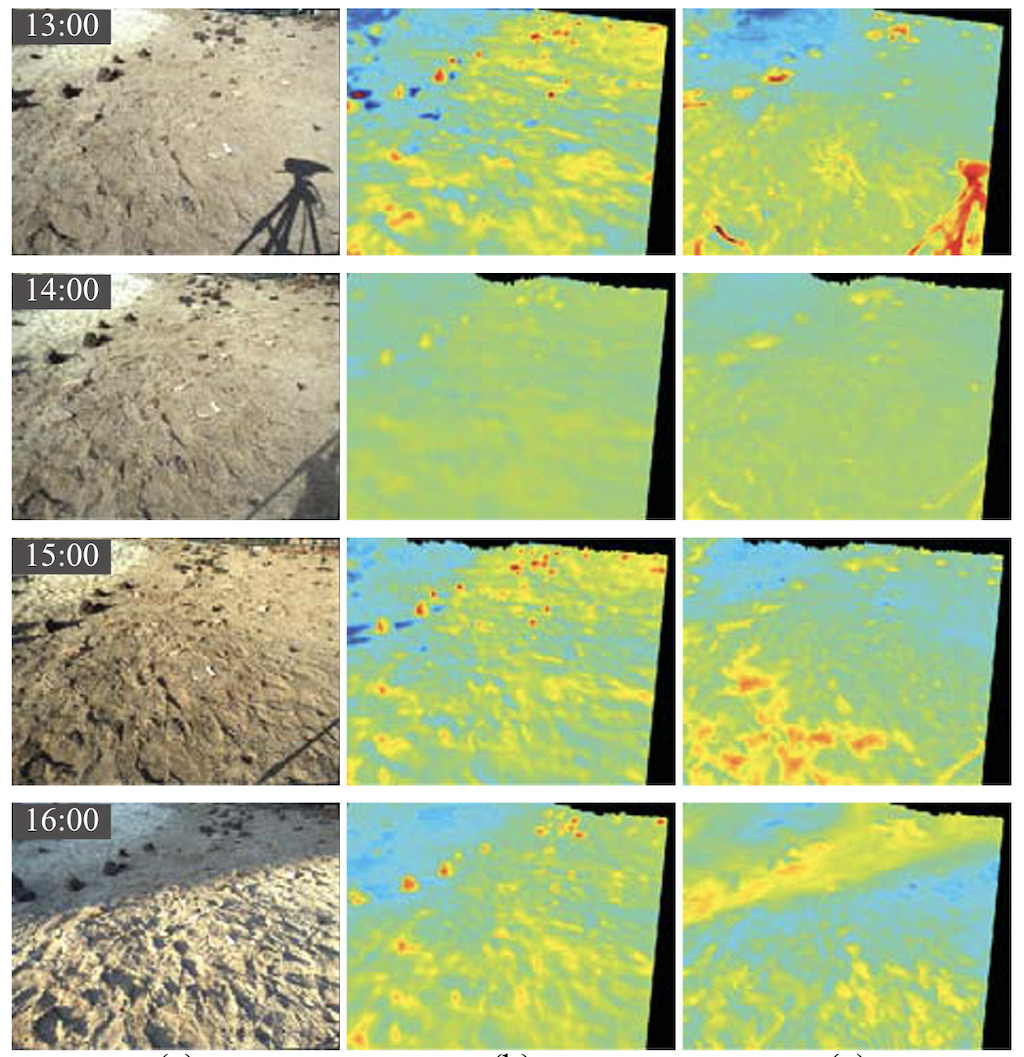
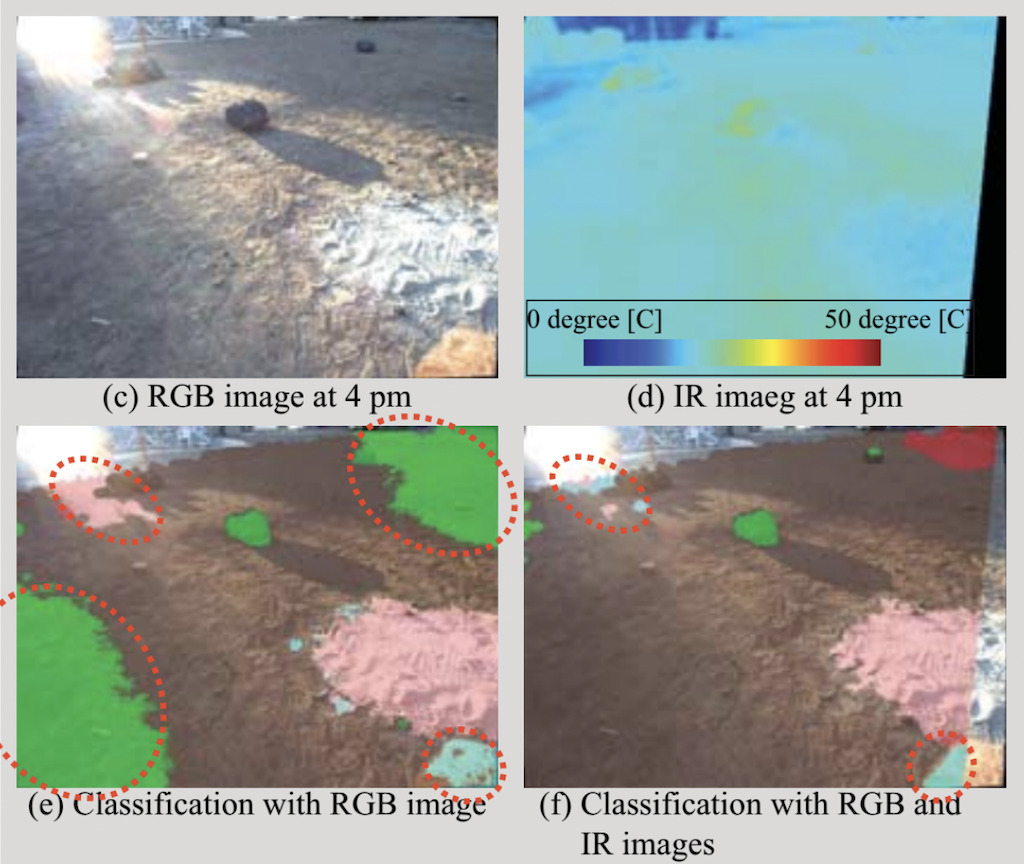
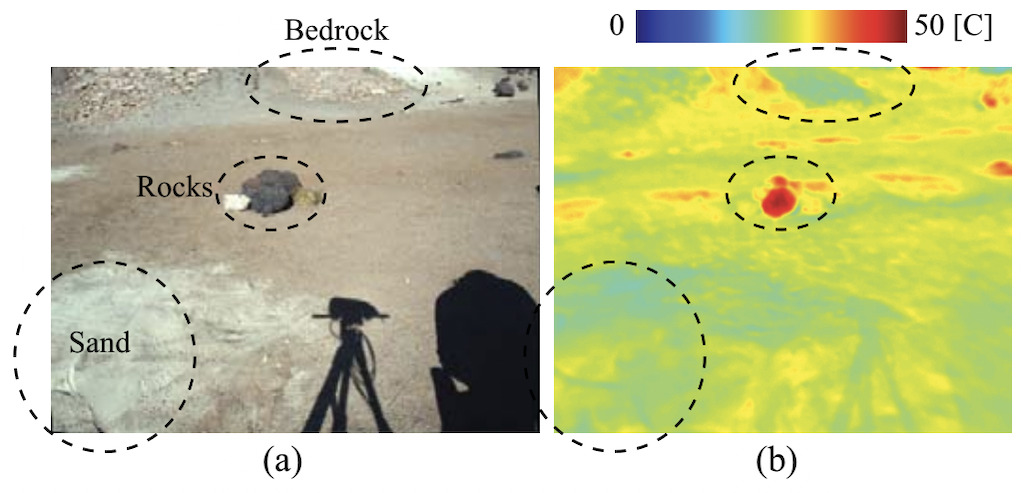
Virtual IR Sensing for Planetary Rovers: Improved Terrain Classification and Thermal Inertia Estimation
, , , , , ,
Paper
, , , , , ,
Paper
Presented at IROS 2020
@article{iwashita2020virtual,
title = {Virtual IR Sensing for Planetary Rovers: Improved Terrain Classification and Thermal Inertia Estimation},
author = {Yumi Iwashita and Kazuto Nakashima and Joseph Gatto and Shoya Higa and Norris Khoo and Ryo Kurazume and Adrian Stoica},
journal = {IEEE Robotics and Automation Letters},
year = {2020},
}IEEE Robotics and Automation Letters (RA-L),
2020
Fukuoka Datasets for Place Categorization
, , , ,
Website Paper
, , , ,
Website Paper
@article{mozos2019fukuoka,
title = {Fukuoka Datasets for Place Categorization},
author = {Oscar Martinez Mozos and Kazuto Nakashima and Hojung Jung and Yumi Iwashita and Ryo Kurazume},
journal = {International Journal of Robotics Research},
year = {2019},
}International Journal of Robotics Research (IJRR),
2019
Learning Geometric and Photometric Features from Panoramic LiDAR Scans for Outdoor Place Categorization
, , , , ,
Paper arXiv Code
, , , , ,
Paper arXiv Code
@article{nakashima2018learning,
title = {Learning Geometric and Photometric Features from Panoramic LiDAR Scans for Outdoor Place Categorization},
author = {Kazuto Nakashima and Hojung Jung and Yuki Oto and Yumi Iwashita and Ryo Kurazume and Oscar Martinez Mozos},
journal = {Advanced Robotics},
year = {2018},
}Advanced Robotics (AR),
2018
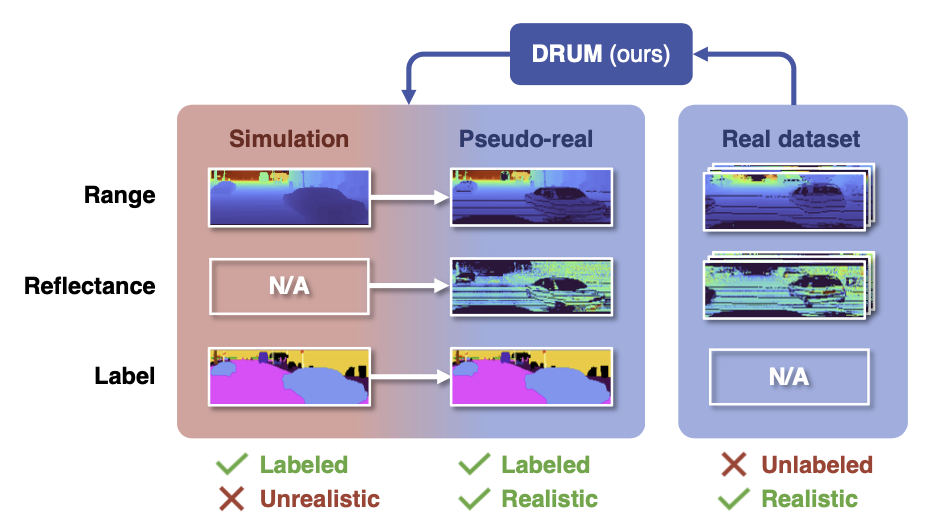
DRUM: Diffusion-based Raydrop-aware Unpaired Mapping for Sim2Real LiDAR Segmentation
, , ,
Website arXiv Code
, , ,
Website arXiv Code
@inproceedings{miyawaki2026drum,
title = {DRUM: Diffusion-based Raydrop-aware Unpaired Mapping for Sim2Real LiDAR Segmentation},
author = {Tomoya Miyawaki and Kazuto Nakashima and Yumi Iwashita and Ryo Kurazume},
booktitle = {IEEE International Conference on Robotics and Automation},
year = {2026},
}IEEE International Conference on Robotics and Automation (ICRA),
2026
Vienna, Austria
Acceptance rate: 38.0%
Vienna, Austria
Acceptance rate: 38.0%
Fast Action Generation Via Knowledge Distillation with Flow Matching for Social Navigation
, , , ,
Paper
, , , ,
Paper
@inproceedings{tomita2026fast,
title = {Fast Action Generation Via Knowledge Distillation with Flow Matching for Social Navigation},
author = {Yuki Tomita and Kohei Matsumoto and Yuki Hyodo and Kazuto Nakashima and Ryo Kurazume},
booktitle = {IEEE/SICE International Symposium on System Integration},
year = {2026},
}IEEE/SICE International Symposium on System Integration (SII),
2026
Cancun, Mexico
Cancun, Mexico
Position-Based Force Control for In-Hand Manipulation Using a Soft-Rigid Hybrid Two-Finger Hand
, , ,
Paper
, , ,
Paper
@inproceedings{katamine2026position-based,
title = {Position-Based Force Control for In-Hand Manipulation Using a Soft-Rigid Hybrid Two-Finger Hand},
author = {Keita Katamine and Hikaru Arita and Kazuto Nakashima and Kenji Tahara},
booktitle = {IEEE/SICE International Symposium on System Integration},
year = {2026},
}IEEE/SICE International Symposium on System Integration (SII),
2026
Cancun, Mexico
Cancun, Mexico
Parameter Design Aimed at Improving the Practicality of the Multiple Virtual Dynamics-Based Force Control
, , ,
Paper
, , ,
Paper
@inproceedings{kanekiyo2026parameter,
title = {Parameter Design Aimed at Improving the Practicality of the Multiple Virtual Dynamics-Based Force Control},
author = {Mikihiro Kanekiyo and Hikaru Arita and Kazuto Nakashima and Kenji Tahara},
booktitle = {IEEE/SICE International Symposium on System Integration},
year = {2026},
}IEEE/SICE International Symposium on System Integration (SII),
2026
Cancun, Mexico
Cancun, Mexico
Object Deformation Suppression for Grasping Leveraging Optical Proximity Sensors
, , , ,
Paper
, , , ,
Paper
@inproceedings{tokiwa2026object,
title = {Object Deformation Suppression for Grasping Leveraging Optical Proximity Sensors},
author = {Shunsuke Tokiwa and Hikaru Arita and Yosuke Suzuki and Kazuto Nakashima and Kenji Tahara},
booktitle = {IEEE/SICE International Symposium on System Integration},
year = {2026},
}IEEE/SICE International Symposium on System Integration (SII),
2026
Cancun, Mexico
Cancun, Mexico
State Estimation of a Shape-Flexible Multi-Fingered Robotic Hand Leveraging Multiple Proximity Sensors Measuring an Ambient Environment Including the Self-Body and a Constant Curvature Model
, , ,
Paper
, , ,
Paper
@inproceedings{morita2026state,
title = {State Estimation of a Shape-Flexible Multi-Fingered Robotic Hand Leveraging Multiple Proximity Sensors Measuring an Ambient Environment Including the Self-Body and a Constant Curvature Model},
author = {Masato Morita and Hikaru Arita and Kazuto Nakashima and Kenji Tahara},
booktitle = {IEEE/SICE International Symposium on System Integration},
year = {2026},
}IEEE/SICE International Symposium on System Integration (SII),
2026
Cancun, Mexico
Cancun, Mexico
Motion Planning Leveraging High-Speed Sensors for Conventional Industrial Manipulator
, , , ,
Paper
, , , ,
Paper
@inproceedings{koreki2026motion,
title = {Motion Planning Leveraging High-Speed Sensors for Conventional Industrial Manipulator},
author = {Misato Koreki and Usukhbayar Chuluunbat and Hikaru Arita and Kazuto Nakashima and Kenji Tahara},
booktitle = {IEEE/SICE International Symposium on System Integration},
year = {2026},
}IEEE/SICE International Symposium on System Integration (SII),
2026
Cancun, Mexico
Cancun, Mexico

Enhancing the Quality of 3D Lunar Maps Using JAXA's Kaguya Imagery
, , , , , , , ,
arXiv
, , , , , , , ,
arXiv
@inproceedings{iwashita2025enhancing,
title = {Enhancing the Quality of 3D Lunar Maps Using JAXA's Kaguya Imagery},
author = {Yumi Iwashita and Haakon Moe and Yang Cheng and Adnan Ansar and Georgios Georgakis and Adrian Stoica and Kazuto Nakashima and Ryo Kurazume and Jim Torresen},
booktitle = {IEEE International Conference on Systems, Man, and Cybernetics},
year = {2025},
}IEEE International Conference on Systems, Man, and Cybernetics (SMC),
2025
Vienna, Austria
Vienna, Austria
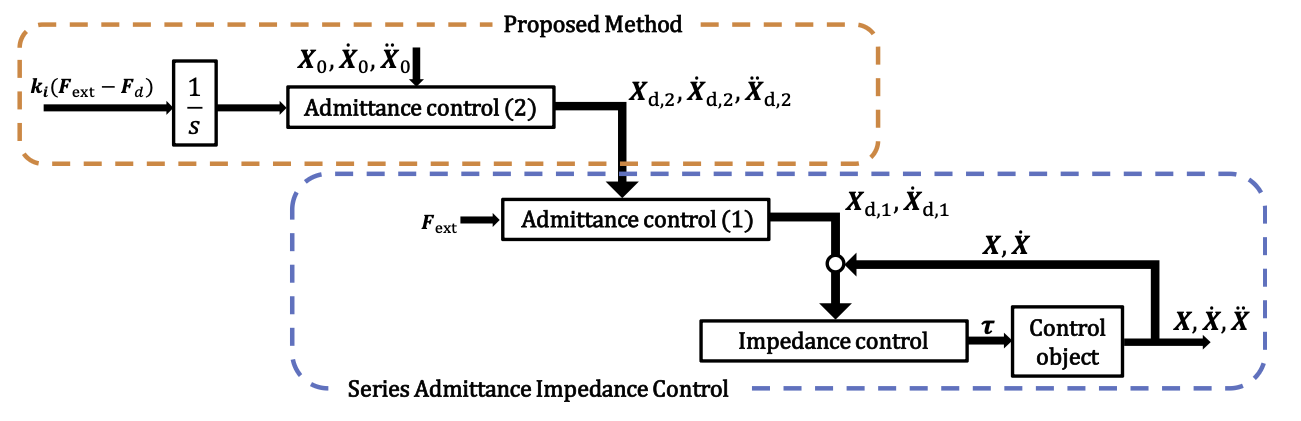
Desired Contact Force Realization in Unknown Environments Via Multiple Virtual Dynamics-Based Control Framework
, , ,
Paper
, , ,
Paper
@inproceedings{kanekiyo2025desired,
title = {Desired Contact Force Realization in Unknown Environments Via Multiple Virtual Dynamics-Based Control Framework},
author = {Mikihiro Kanekiyo and Hikaru Arita and Kazuto Nakashima and Kenji Tahara},
booktitle = {IEEE International Conference on Automation Science and Engineering},
year = {2025},
}IEEE International Conference on Automation Science and Engineering (CASE),
2025
Los Angeles, USA
Los Angeles, USA
Fast LiDAR Data Generation with Rectified Flows
, , , ,
Website Paper arXiv Code Demo Slide Poster
, , , ,
Website Paper arXiv Code Demo Slide Poster
@inproceedings{nakashima2025fast,
title = {Fast LiDAR Data Generation with Rectified Flows},
author = {Kazuto Nakashima and Xiaowen Liu and Tomoya Miyawaki and Yumi Iwashita and Ryo Kurazume},
booktitle = {IEEE International Conference on Robotics and Automation},
year = {2025},
}IEEE International Conference on Robotics and Automation (ICRA),
2025
Atlanta, USA
Acceptance rate: 38.7%
Atlanta, USA
Acceptance rate: 38.7%
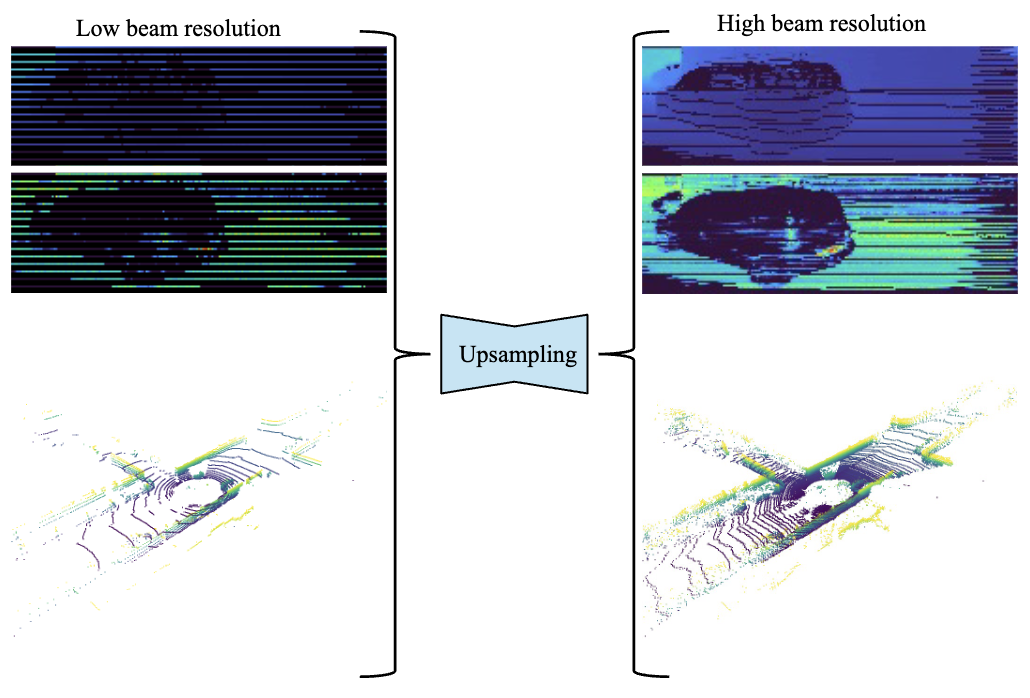
Gait Sequence Upsampling using Diffusion Models for Single LiDAR Sensors
, , , ,
Paper arXiv
, , , ,
Paper arXiv
@inproceedings{ahn2025gait,
title = {Gait Sequence Upsampling using Diffusion Models for Single LiDAR Sensors},
author = {Jeongho Ahn and Kazuto Nakashima and Koki Yoshino and Yumi Iwashita and Ryo Kurazume},
booktitle = {IEEE/SICE International Symposium on System Integration},
year = {2025},
}IEEE/SICE International Symposium on System Integration (SII),
2025
Munich, Germany
Munich, Germany
S2Gait: RGB-based Gait Recognition with Style Feature Sampling Data Augmentation
, , , ,
Paper
, , , ,
Paper
@inproceedings{yoshino2025s2gait,
title = {S2Gait: RGB-based Gait Recognition with Style Feature Sampling Data Augmentation},
author = {Koki Yoshino and Kazuto Nakashima and Jeongho Ahn and Yumi Iwashita and Ryo Kurazume},
booktitle = {IEEE/SICE International Symposium on System Integration},
year = {2025},
}IEEE/SICE International Symposium on System Integration (SII),
2025
Munich, Germany
Munich, Germany

Sensor Pods and ROS2-TMS for Construction for Cyber-Physical System at Earthwork Sites
, , , , , , ,
Paper
, , , , , , ,
Paper
@inproceedings{maeda2024sensor,
title = {Sensor Pods and ROS2-TMS for Construction for Cyber-Physical System at Earthwork Sites},
author = {Ryuichi Maeda and Tomoya Kouno and Kohei Matsumoto and Yuichiro Kasahara and Tomoya Itsuka and Kazuto Nakashima and Yusuke Tamaishi and Ryo Kurazume},
booktitle = {IEEE International Symposium on Safety, Security, and Rescue Robotics},
year = {2024},
}IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR),
2024
New York, USA
New York, USA
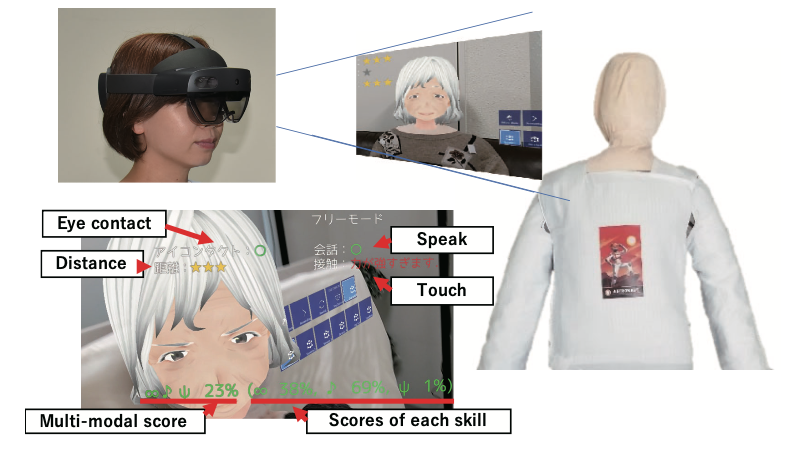
Development of Dementia Care Training System using AR and Large Language Model
, , , ,
Paper
, , , ,
Paper
@inproceedings{miyawaki2024development,
title = {Development of Dementia Care Training System using AR and Large Language Model},
author = {Tomoya Miyawaki and Yuki Nishiura and Ryouta Fukuda and Kazuto Nakashima and Ryo Kurazume},
booktitle = {IEEE International Conference on Systems, Man, and Cybernetics},
year = {2024},
}IEEE International Conference on Systems, Man, and Cybernetics (SMC),
2024
Kuching, Malaysia
Kuching, Malaysia
Fast LiDAR Upsampling using Conditional Diffusion Models
, , ,
arXiv Code
, , ,
arXiv Code
@inproceedings{helgesen2024fast,
title = {Fast LiDAR Upsampling using Conditional Diffusion Models},
author = {Sander Elias Magnussen Helgesen and Kazuto Nakashima and Jim Tørresen and Ryo Kurazume},
booktitle = {IEEE International Conference on Robot and Human Interactive Communication},
year = {2024},
}IEEE International Conference on Robot and Human Interactive Communication (RO-MAN),
2024
Pasadena, USA
Pasadena, USA
LiDAR Data Synthesis with Denoising Diffusion Probabilistic Models
,
Website Paper arXiv Code Demo Slide Poster
,
Website Paper arXiv Code Demo Slide Poster
@inproceedings{nakashima2024lidar,
title = {LiDAR Data Synthesis with Denoising Diffusion Probabilistic Models},
author = {Kazuto Nakashima and Ryo Kurazume},
booktitle = {IEEE International Conference on Robotics and Automation},
year = {2024},
}IEEE International Conference on Robotics and Automation (ICRA),
2024
Yokohama, Japan
Acceptance rate: 44.8%
Yokohama, Japan
Acceptance rate: 44.8%
ROS2-TMS for Construction: CPS platform for earthwork sites
, , , , , ,
, , , , , ,
@inproceedings{maeda2024ros2-tms,
title = {ROS2-TMS for Construction: CPS platform for earthwork sites},
author = {Ryuichi Maeda and Kohei Matsumoto and Tomoya Kouno and Tomoya Itsuka and Kazuto Nakashima and Yusuke Tamaishi and Ryo Kurazume},
booktitle = {International Symposium on Artificial Life and Robotics},
year = {2024},
}International Symposium on Artificial Life and Robotics (AROB),
2024
Beppu, Japan
Beppu, Japan

Development of a Retrofit Backhoe Teleoperation System using Cat Command
, , , , ,
Paper
, , , , ,
Paper
@inproceedings{shibata2024development,
title = {Development of a Retrofit Backhoe Teleoperation System using Cat Command},
author = {Koshi Shibata and Yuki Nishiura and Yusuke Tamaishi and Kohei Matsumoto and Kazuto Nakashima and Ryo Kurazume},
booktitle = {IEEE/SICE International Symposium on System Integration},
year = {2024},
}IEEE/SICE International Symposium on System Integration (SII),
2024
Ha Long, Vietnam
Ha Long, Vietnam

Evaluation of Ground Stiffness using Multiple Accelerometers on the Ground during Compaction by Vibratory Rollers
, , , , ,
Paper
, , , , ,
Paper
@inproceedings{tamaishi2023evaluation,
title = {Evaluation of Ground Stiffness using Multiple Accelerometers on the Ground during Compaction by Vibratory Rollers},
author = {Yusuke Tamaishi and Kentaro Fukuda and Kazuto Nakashima and Ryuichi Maeda and Kohei Matsumoto and Ryo Kurazume},
booktitle = {International Symposium on Automation and Robotics in Construction},
year = {2023},
}International Symposium on Automation and Robotics in Construction (ISARC),
2023
Chennai, India
Chennai, India
Analysis of Force Applied to Horizontal and Vertical Handrails with Impaired Motor Function
, , , , ,
Paper
, , , , ,
Paper
@inproceedings{kihara2023analysis,
title = {Analysis of Force Applied to Horizontal and Vertical Handrails with Impaired Motor Function},
author = {Ryoya Kihara and Qi An and Kensuke Takita and Shu Ishiguro and Kazuto Nakashima and Ryo Kurazume},
booktitle = {IEEE/SICE International Symposium on System Integrations},
year = {2023},
}IEEE/SICE International Symposium on System Integrations (SII),
2023
Atlanta, USA
Atlanta, USA
Generative Range Imaging for Learning Scene Priors of 3D LiDAR Data
, ,
Website Paper arXiv Code Slide Poster
, ,
Website Paper arXiv Code Slide Poster
@inproceedings{nakashima2023generative,
title = {Generative Range Imaging for Learning Scene Priors of 3D LiDAR Data},
author = {Kazuto Nakashima and Yumi Iwashita and Ryo Kurazume},
booktitle = {IEEE/CVF Winter Conference on Applications of Computer Vision},
year = {2023},
}IEEE/CVF Winter Conference on Applications of Computer Vision (WACV),
2023
Waikoloa, USA
Acceptance rate: 40.6%
Waikoloa, USA
Acceptance rate: 40.6%
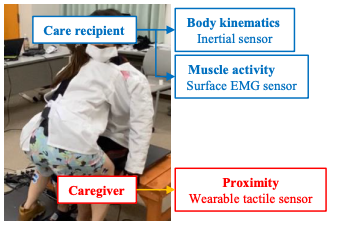
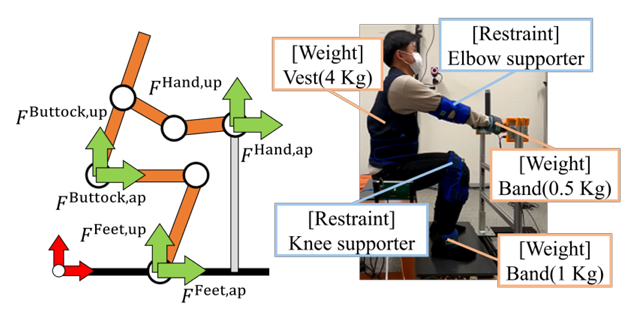
Understanding Humanitude Care for Sit-To-Stand Motion by Wearable Sensors
, , , , ,
Paper
, , , , ,
Paper
@inproceedings{an2022understanding,
title = {Understanding Humanitude Care for Sit-To-Stand Motion by Wearable Sensors},
author = {Qi An and Akito Tanaka and Kazuto Nakashima and Hidenobu Sumioka and Masahiro Shiomi and Ryo Kurazume},
booktitle = {IEEE International Conference on Systems, Man, and Cybernetics},
year = {2022},
}IEEE International Conference on Systems, Man, and Cybernetics (SMC),
2022
Prague, Czech Republic
Prague, Czech Republic
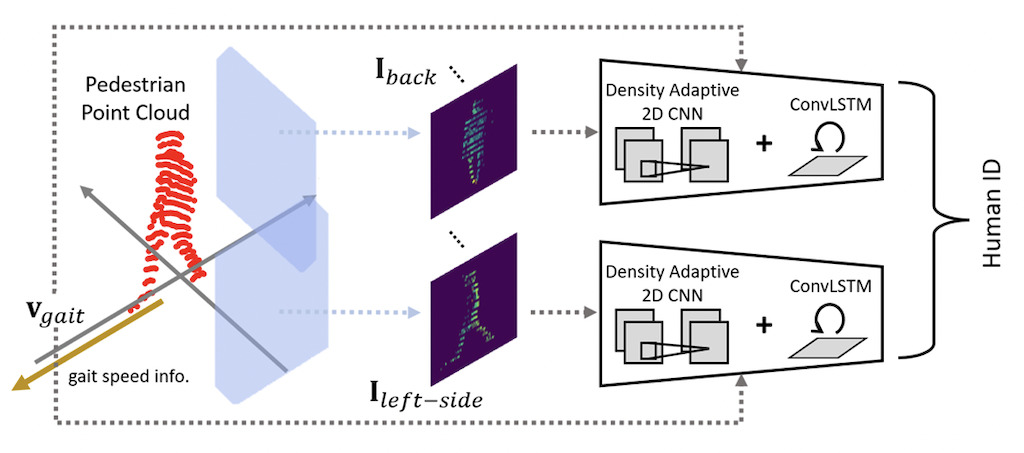
2V-Gait: Gait Recognition Using 3D LiDAR Robust to Changes in Walking Direction and Measurement Distance
, , , ,
Paper
, , , ,
Paper
@inproceedings{ahn20222v-gait,
title = {2V-Gait: Gait Recognition Using 3D LiDAR Robust to Changes in Walking Direction and Measurement Distance},
author = {Jeongho Ahn and Kazuto Nakashima and Koki Yoshino and Yumi Iwashita and Ryo Kurazume},
booktitle = {IEEE/SICE International Symposium on System Integration},
year = {2022},
}IEEE/SICE International Symposium on System Integration (SII),
2022
Online
Online
Gait Recognition using Identity-Aware Adversarial Data Augmentation
, , , ,
Paper
, , , ,
Paper
@inproceedings{yoshino2022gait,
title = {Gait Recognition using Identity-Aware Adversarial Data Augmentation},
author = {Koki Yoshino and Kazuto Nakashima and Jeongho Ahn and Yumi Iwashita and Ryo Kurazume},
booktitle = {IEEE/SICE International Symposium on System Integration},
year = {2022},
}IEEE/SICE International Symposium on System Integration (SII),
2022
Online
Online
Learning to Drop Points for LiDAR Scan Synthesis
,
Website Paper arXiv Code Slide
,
Website Paper arXiv Code Slide
@inproceedings{nakashima2021learning,
title = {Learning to Drop Points for LiDAR Scan Synthesis},
author = {Kazuto Nakashima and Ryo Kurazume},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems},
year = {2021},
}IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),
2021
Online
Acceptance rate: 45.5%
Online
Acceptance rate: 45.5%
MU-Net: Deep Learning-Based Thermal IR Image Estimation From RGB Image
, , , ,
Website Paper
, , , ,
Website Paper
@inproceedings{iwashita2019mu-net,
title = {MU-Net: Deep Learning-Based Thermal IR Image Estimation From RGB Image},
author = {Yumi Iwashita and Kazuto Nakashima and Sir Rafol and Adrian Stoica and Ryo Kurazume},
booktitle = {IEEE/CVF Computer Vision and Pattern Recognition Conference Workshops},
year = {2019},
}IEEE/CVF Computer Vision and Pattern Recognition Conference Workshops (CVPRW),
2019
Long Beach, USA
Long Beach, USA
TU-Net and TDeepLab: Deep Learning-based Terrain Classification Robust to Illumination Changes, Combining Visible and Thermal Imagery
, , ,
Website Paper
, , ,
Website Paper
@inproceedings{iwashita2019tu-net,
title = {TU-Net and TDeepLab: Deep Learning-based Terrain Classification Robust to Illumination Changes, Combining Visible and Thermal Imagery},
author = {Yumi Iwashita and Kazuto Nakashima and Adrian Stoica and Ryo Kurazume},
booktitle = {IEEE Conference on Multimedia Information Processing and Retrieval},
year = {2019},
}IEEE Conference on Multimedia Information Processing and Retrieval (MIPR),
2019
San Jose, USA
Acceptance rate: 19.5%
San Jose, USA
Acceptance rate: 19.5%
Fourth-person Captioning: Describing Daily Events by Uni-supervised and Tri-regularized Training
, , ,
Paper
, , ,
Paper
@inproceedings{nakashima2018fourth-person,
title = {Fourth-person Captioning: Describing Daily Events by Uni-supervised and Tri-regularized Training},
author = {Kazuto Nakashima and Yumi Iwashita and Akihiro Kawamura and Ryo Kurazume},
booktitle = {IEEE International Conference on Systems, Man, and Cybernetics},
year = {2018},
}IEEE International Conference on Systems, Man, and Cybernetics (SMC),
2018
Miyazaki, Japan
Miyazaki, Japan
Virtual Sensors Determined Through Machine Learning
, , , ,
Paper
, , , ,
Paper
@inproceedings{iwashita2018virtual,
title = {Virtual Sensors Determined Through Machine Learning},
author = {Yumi Iwashita and Adrian Stoica and Kazuto Nakashima and Ryo Kurazume and Jim Torresen},
booktitle = {World Automation Congress},
year = {2018},
}World Automation Congress (WAC),
2018
Stevenson, USA
Stevenson, USA
Recognizing Outdoor Scenes by Convolutional Features of Omni-Directional LiDAR Scans
, , , , ,
Paper
, , , , ,
Paper
@inproceedings{nakashima2017recognizing,
title = {Recognizing Outdoor Scenes by Convolutional Features of Omni-Directional LiDAR Scans},
author = {Kazuto Nakashima and Seungwoo Nham and Hojung Jung and Yumi Iwashita and Ryo Kurazume and Oscar M Mozos},
booktitle = {IEEE/SICE International Symposium on System Integration},
year = {2017},
}IEEE/SICE International Symposium on System Integration (SII),
2017
Taipei, Taiwan
Taipei, Taiwan

Previewed Reality: Near-Future Perception System
, , , ,
Paper
, , , ,
Paper
@inproceedings{horikawa2017previewed,
title = {Previewed Reality: Near-Future Perception System},
author = {Yuta Horikawa and Asuka Egashira and Kazuto Nakashima and Akihiro Kawamura and Ryo Kurazume},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems},
year = {2017},
}IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),
2017
Vancouver, Canada
Acceptance rate: 44.8%
Vancouver, Canada
Acceptance rate: 44.8%

Feasibility Study of IoRT Platform "Big Sensor Box"
, , , ,
Website Paper Code
, , , ,
Website Paper Code
Finalist of Best Service Robotics Paper Award
@inproceedings{kurazume2017feasibility,
title = {Feasibility Study of IoRT Platform "Big Sensor Box"},
author = {Ryo Kurazume and Yoonseok Pyo and Kazuto Nakashima and Akihiro Kawamura and Tokuo Tsuji},
booktitle = {IEEE International Conference on Robotics and Automation},
year = {2017},
}IEEE International Conference on Robotics and Automation (ICRA),
2017
Singapore
Acceptance rate: 41.0%
Singapore
Acceptance rate: 41.0%
Automatic Houseware Registration System for Informationally-Structured Environment
, , ,
Paper
, , ,
Paper
@inproceedings{nakashima2016automatic,
title = {Automatic Houseware Registration System for Informationally-Structured Environment},
author = {Kazuto Nakashima and Julien Girard and Yumi Iwashita and Ryo Kurazume},
booktitle = {IEEE/SICE International Symposium on System Integration},
year = {2016},
}IEEE/SICE International Symposium on System Integration (SII),
2016
Sapporo, Japan
Sapporo, Japan
Fourth-Person Sensing for a Service Robot
, , , ,
Paper
, , , ,
Paper
@inproceedings{nakashima2015fourth-person,
title = {Fourth-Person Sensing for a Service Robot},
author = {Kazuto Nakashima and Yumi Iwashita and Pyo Yoonseok and Asamichi Takamine and Ryo Kurazume},
booktitle = {IEEE SENSORS},
year = {2015},
}IEEE SENSORS,
2015
Busan, Korea
Busan, Korea
Fourth-Person Sensing for Pro-active Services
, , ,
Paper
, , ,
Paper
@inproceedings{iwashita2014fourth-person,
title = {Fourth-Person Sensing for Pro-active Services},
author = {Yumi Iwashita and Kazuto Nakashima and Yoonseok Pyo and Ryo Kurazume},
booktitle = {International Conference on Emerging Security Technologies},
year = {2014},
}International Conference on Emerging Security Technologies (EST),
2014
Alcala de Henares, Spain
Alcala de Henares, Spain
DRUM: Diffusion-based Raydrop-aware Unpaired Mapping for Sim2Real LiDAR Segmentation
, , ,
Website arXiv Code
, , ,
Website arXiv Code
Accepted to ICRA 2026
@misc{DRUM-Diffusion-based-Raydrop-aware-Unpaired-Mapping-for-Sim2Real-LiDAR-Segmentation,
title = {DRUM: Diffusion-based Raydrop-aware Unpaired Mapping for Sim2Real LiDAR Segmentation},
author = {Tomoya Miyawaki and Kazuto Nakashima and Yumi Iwashita and Ryo Kurazume},
note = {arXiv:2603.26263},
year = {2026},
}arXiv:2603.26263,
2026
Learning Geometric and Photometric Features from Panoramic LiDAR Scans for Outdoor Place Categorization
, , , , ,
Paper arXiv Code
, , , , ,
Paper arXiv Code
Journal paper published in Advanced Robotics (2018)
@misc{Learning-Geometric-and-Photometric-Features-from-Panoramic-LiDAR-Scans-for-Outdoor-Place-Categorization,
title = {Learning Geometric and Photometric Features from Panoramic LiDAR Scans for Outdoor Place Categorization},
author = {Kazuto Nakashima and Hojung Jung and Yuki Oto and Yumi Iwashita and Ryo Kurazume and Oscar Martinez Mozos},
note = {arXiv:2603.12663},
year = {2026},
}arXiv:2603.12663,
2026
Enhancing the Quality of 3D Lunar Maps Using JAXA's Kaguya Imagery
, , , , , , , ,
arXiv
, , , , , , , ,
arXiv
Accepted to SMC 2025
@misc{Enhancing-the-Quality-of-3D-Lunar-Maps-Using-JAXAs-Kaguya-Imagery,
title = {Enhancing the Quality of 3D Lunar Maps Using JAXA's Kaguya Imagery},
author = {Yumi Iwashita and Haakon Moe and Yang Cheng and Adnan Ansar and Georgios Georgakis and Adrian Stoica and Kazuto Nakashima and Ryo Kurazume and Jim Torresen},
note = {arXiv:2510.11817},
year = {2025},
}arXiv:2510.11817,
2025
Fast LiDAR Data Generation with Rectified Flows
, , , ,
Website Paper arXiv Code Demo Slide Poster
, , , ,
Website Paper arXiv Code Demo Slide Poster
Accepted to ICRA 2025
@misc{Fast-LiDAR-Data-Generation-with-Rectified-Flows,
title = {Fast LiDAR Data Generation with Rectified Flows},
author = {Kazuto Nakashima and Xiaowen Liu and Tomoya Miyawaki and Yumi Iwashita and Ryo Kurazume},
note = {arXiv:2412.02241},
year = {2024},
}arXiv:2412.02241,
2024
Gait Sequence Upsampling using Diffusion Models for Single LiDAR Sensors
, , , ,
arXiv
, , , ,
arXiv
Accepted to SII 2025
@misc{Gait-Sequence-Upsampling-using-Diffusion-Models-for-Single-LiDAR-Sensors,
title = {Gait Sequence Upsampling using Diffusion Models for Single LiDAR Sensors},
author = {Jeongho Ahn and Kazuto Nakashima and Koki Yoshino and Yumi Iwashita and Ryo Kurazume},
note = {arXiv:2410.08680},
year = {2024},
}arXiv:2410.08680,
2024
Fast LiDAR Upsampling using Conditional Diffusion Models
, , ,
arXiv Code
, , ,
arXiv Code
Accepted to RO-MAN 2024
@misc{Fast-LiDAR-Upsampling-using-Conditional-Diffusion-Models,
title = {Fast LiDAR Upsampling using Conditional Diffusion Models},
author = {Sander Elias Magnussen Helgesen and Kazuto Nakashima and Jim Tørresen and Ryo Kurazume},
note = {arXiv:2405.04889},
year = {2024},
}arXiv:2405.04889,
2024
LiDAR Data Synthesis with Denoising Diffusion Probabilistic Models
,
Website Paper arXiv Code Demo Slide Poster
,
Website Paper arXiv Code Demo Slide Poster
Accepted to ICRA 2024
@misc{LiDAR-Data-Synthesis-with-Denoising-Diffusion-Probabilistic-Models,
title = {LiDAR Data Synthesis with Denoising Diffusion Probabilistic Models},
author = {Kazuto Nakashima and Ryo Kurazume},
note = {arXiv:2309.09256},
year = {2023},
}arXiv:2309.09256,
2023
Generative Range Imaging for Learning Scene Priors of 3D LiDAR Data
, ,
Website Paper arXiv Code Slide Poster
, ,
Website Paper arXiv Code Slide Poster
Accepted to WACV 2023
@misc{Generative-Range-Imaging-for-Learning-Scene-Priors-of-3D-LiDAR-Data,
title = {Generative Range Imaging for Learning Scene Priors of 3D LiDAR Data},
author = {Kazuto Nakashima and Yumi Iwashita and Ryo Kurazume},
note = {arXiv:2210.11750},
year = {2022},
}arXiv:2210.11750,
2022
Learning to Drop Points for LiDAR Scan Synthesis
,
Website Paper arXiv Code Slide
,
Website Paper arXiv Code Slide
Accepted to IROS 2021
@misc{Learning-to-Drop-Points-for-LiDAR-Scan-Synthesis,
title = {Learning to Drop Points for LiDAR Scan Synthesis},
author = {Kazuto Nakashima and Ryo Kurazume},
note = {arXiv:2102.11952},
year = {2021},
}arXiv:2102.11952,
2021
Evaluation of End-Point Stiffness in a Hybrid Soft-Rigid Parallel Manipulator
, , ,
, , ,
@inproceedings{shimoyanakita2026evaluation,
title = {Evaluation of End-Point Stiffness in a Hybrid Soft-Rigid Parallel Manipulator},
author = {Koki Shimoyanakita and Hikaru Arita and Kazuto Nakashima and Kenji Tahara},
booktitle = {IEEE-RAS International Conference on Soft Robotics},
year = {2026},
}IEEE-RAS International Conference on Soft Robotics (RoboSoft),
2026
Kanazawa, Japan
Kanazawa, Japan
State Estimation of a Shape-flexible Multi-fingered Robotic Hand via Distributed Proximity Sensing
, , ,
, , ,
@inproceedings{morita20256state,
title = {State Estimation of a Shape-flexible Multi-fingered Robotic Hand via Distributed Proximity Sensing},
author = {Masato Morita and Hikaru Arita and Kazuto Nakashima and Kenji Tahara},
booktitle = {IEEE-RAS International Conference on Soft Robotics},
year = {2026},
}IEEE-RAS International Conference on Soft Robotics (RoboSoft),
2026
Kanazawa, Japan
Kanazawa, Japan
Multi-perspective Image Captioning for Human-Robot Symbiotic Scenes
,
,
Oral Contribution Award
@inproceedings{nakashima2019multi-perspective,
title = {Multi-perspective Image Captioning for Human-Robot Symbiotic Scenes},
author = {Kazuto Nakashima and Ryo Kurazume},
booktitle = {Joint Workshop on Machine Perception and Robotics},
year = {2019},
}Joint Workshop on Machine Perception and Robotics (MPR),
2019
Shiga, Japan
Shiga, Japan
CNN based Beach Litter Classification using LiDAR
, ,
, ,
@inproceedings{lee2019cnn,
title = {CNN based Beach Litter Classification using LiDAR},
author = {Beomjoon Lee and Kazuto Nakashima and Ryo Kurazume},
booktitle = {Joint Workshop on Machine Perception and Robotics},
year = {2019},
}Joint Workshop on Machine Perception and Robotics (MPR),
2019
Shiga, Japan
Shiga, Japan
Describing Daily Events in Intelligent Space via Fourth-person Perspective Images
,
,
Best Poster Presentation Award
@inproceedings{nakashima2018describing,
title = {Describing Daily Events in Intelligent Space via Fourth-person Perspective Images},
author = {Kazuto Nakashima and Ryo Kurazume},
booktitle = {Joint Workshop on Machine Perception and Robotics},
year = {2018},
}Joint Workshop on Machine Perception and Robotics (MPR),
2018
Fukuoka, Japan
Fukuoka, Japan
A CNN-based Gait Recognition Robust to Low Resolution Images using Inter-image Difference
, , , ,
, , , ,
@inproceedings{setoguchi2018a,
title = {A CNN-based Gait Recognition Robust to Low Resolution Images using Inter-image Difference},
author = {Naoki Setoguchi and Kazuto Nakashima and Wu Tong and Yumi Iwashita and Ryo Kurazume},
booktitle = {Joint Workshop on Machine Perception and Robotics},
year = {2018},
}Joint Workshop on Machine Perception and Robotics (MPR),
2018
Fukuoka, Japan
Fukuoka, Japan
Previewed Reality: Near-Future Perception System
, , , ,
, , , ,
@inproceedings{horikawa2017previewed,
title = {Previewed Reality: Near-Future Perception System},
author = {Yuta Horikawa and Asuka Egashira and Kazuto Nakashima and Akihiro Kawamura and Ryo Kurazume},
booktitle = {Joint Workshop on Machine Perception and Robotics},
year = {2017},
}Joint Workshop on Machine Perception and Robotics (MPR),
2017
Peking, China
Peking, China
Navigation System of Personal Mobility in Informationally Structured/Unstructured Environments
, , , , , ,
, , , , , ,
Joint Workshop on Machine Perception and Robotics (MPR),
2017
Peking, China
Peking, China
Houseware Detection using Wearable Camera
, ,
, ,
@inproceedings{nakashima2016houseware,
title = {Houseware Detection using Wearable Camera},
author = {Kazuto Nakashima and Yumi Iwashita and Ryo Kurazume},
booktitle = {Joint Workshop on Machine Perception and Robotics},
year = {2016},
}Joint Workshop on Machine Perception and Robotics (MPR),
2016
Osaka, Japan
Osaka, Japan
Gait Recognition using Convolutional Neural Networks
, , ,
, , ,
@inproceedings{wu2016gait,
title = {Gait Recognition using Convolutional Neural Networks},
author = {Tong Wu and Kazuto Nakashima and Yumi Iwashita and Ryo Kurazume},
booktitle = {Joint Workshop on Machine Perception and Robotics},
year = {2016},
}Joint Workshop on Machine Perception and Robotics (MPR),
2016
Osaka, Japan
Osaka, Japan
Presented in Japanese 🇯🇵
My name is written as "中嶋 一斗".
拡散モデルで生成した擬似実データに基づく半教師あり LiDAR セグメンテーション
, , ,
, , ,
優秀講演賞
@inproceedings{%E6%8B%A1%E6%95%A3%E3%83%A2%E3%83%87%E3%83%AB%E3%81%A7%E7%94%9F%E6%88%90%E3%81%97%E3%81%9F%E6%93%AC%E4%BC%BC%E5%AE%9F%E3%83%87%E3%83%BC%E3%82%BF%E3%81%AB%E5%9F%BA%E3%81%A5%E3%81%8F%E5%8D%8A%E6%95%99%E5%B8%AB%E3%81%82%E3%82%8A-LiDAR-%E3%82%BB%E3%82%B0%E3%83%A1%E3%83%B3%E3%83%86%E3%83%BC%E3%82%B7%E3%83%A7%E3%83%B3,
title = {拡散モデルで生成した擬似実データに基づく半教師あり LiDAR セグメンテーション},
author = {宮脇 智也 and 中嶋 一斗 and 岩下 友美 and 倉爪 亮},
booktitle = {計測自動制御学会システムインテグレーション部門講演会},
year = {2025},
}計測自動制御学会システムインテグレーション部門講演会 (SI),
2025
広島
広島
土木施工現場の状況把握のためのセンサポッド実証機の開発
, , , , , ,
, , , , , ,
@inproceedings{%E5%9C%9F%E6%9C%A8%E6%96%BD%E5%B7%A5%E7%8F%BE%E5%A0%B4%E3%81%AE%E7%8A%B6%E6%B3%81%E6%8A%8A%E6%8F%A1%E3%81%AE%E3%81%9F%E3%82%81%E3%81%AE%E3%82%BB%E3%83%B3%E3%82%B5%E3%83%9D%E3%83%83%E3%83%89%E5%AE%9F%E8%A8%BC%E6%A9%9F%E3%81%AE%E9%96%8B%E7%99%BA,
title = {土木施工現場の状況把握のためのセンサポッド実証機の開発},
author = {高野 智也 and 秋成 光太 and 堤 哲之介 and 笠原 侑一郎 and 松本 耕平 and 中嶋 一斗 and 倉爪 亮},
booktitle = {計測自動制御学会システムインテグレーション部門講演会},
year = {2025},
}計測自動制御学会システムインテグレーション部門講演会 (SI),
2025
広島
広島
柔剛一体パラレルリンクロボットの開発
, , ,
, , ,
@inproceedings{%E6%9F%94%E5%89%9B%E4%B8%80%E4%BD%93%E3%83%91%E3%83%A9%E3%83%AC%E3%83%AB%E3%83%AA%E3%83%B3%E3%82%AF%E3%83%AD%E3%83%9C%E3%83%83%E3%83%88%E3%81%AE%E9%96%8B%E7%99%BA,
title = {柔剛一体パラレルリンクロボットの開発},
author = {下柳田 皓貴 and 有田 輝 and 中嶋 一斗 and 田原 健二},
booktitle = {計測自動制御学会システムインテグレーション部門講演会},
year = {2025},
}計測自動制御学会システムインテグレーション部門講演会 (SI),
2025
広島
広島
柔剛一体2指ハンドの位置制御ベース力制御による物体把持
, , ,
, , ,
@inproceedings{%E6%9F%94%E5%89%9B%E4%B8%80%E4%BD%932%E6%8C%87%E3%83%8F%E3%83%B3%E3%83%89%E3%81%AE%E4%BD%8D%E7%BD%AE%E5%88%B6%E5%BE%A1%E3%83%99%E3%83%BC%E3%82%B9%E5%8A%9B%E5%88%B6%E5%BE%A1%E3%81%AB%E3%82%88%E3%82%8B%E7%89%A9%E4%BD%93%E6%8A%8A%E6%8C%81,
title = {柔剛一体2指ハンドの位置制御ベース力制御による物体把持},
author = {片峯 啓太 and 有田 輝 and 中嶋 一斗 and 田原 健二},
booktitle = {日本ロボット学会学術講演会},
year = {2025},
}日本ロボット学会学術講演会 (RSJ),
2025
東京
東京
多重仮想ダイナミクスに基づく力制御における環境との接触喪失時のマニピュレータの運動
, , ,
, , ,
@inproceedings{%E5%A4%9A%E9%87%8D%E4%BB%AE%E6%83%B3%E3%83%80%E3%82%A4%E3%83%8A%E3%83%9F%E3%82%AF%E3%82%B9%E3%81%AB%E5%9F%BA%E3%81%A5%E3%81%8F%E5%8A%9B%E5%88%B6%E5%BE%A1%E3%81%AB%E3%81%8A%E3%81%91%E3%82%8B%E7%92%B0%E5%A2%83%E3%81%A8%E3%81%AE%E6%8E%A5%E8%A7%A6%E5%96%AA%E5%A4%B1%E6%99%82%E3%81%AE%E3%83%9E%E3%83%8B%E3%83%94%E3%83%A5%E3%83%AC%E3%83%BC%E3%82%BF%E3%81%AE%E9%81%8B%E5%8B%95,
title = {多重仮想ダイナミクスに基づく力制御における環境との接触喪失時のマニピュレータの運動},
author = {兼清 幹大 and 有田 輝 and 中嶋 一斗 and 田原 健二},
booktitle = {日本ロボット学会学術講演会},
year = {2025},
}日本ロボット学会学術講演会 (RSJ),
2025
東京
東京
リーダーフォロワーシステムにおける仮想力に基づくバイラテラル動作補正
, , ,
, , ,
@inproceedings{%E3%83%AA%E3%83%BC%E3%83%80%E3%83%BC%E3%83%95%E3%82%A9%E3%83%AD%E3%83%AF%E3%83%BC%E3%82%B7%E3%82%B9%E3%83%86%E3%83%A0%E3%81%AB%E3%81%8A%E3%81%91%E3%82%8B%E4%BB%AE%E6%83%B3%E5%8A%9B%E3%81%AB%E5%9F%BA%E3%81%A5%E3%81%8F%E3%83%90%E3%82%A4%E3%83%A9%E3%83%86%E3%83%A9%E3%83%AB%E5%8B%95%E4%BD%9C%E8%A3%9C%E6%AD%A3,
title = {リーダーフォロワーシステムにおける仮想力に基づくバイラテラル動作補正},
author = {田中 連 and 田原 健二 and 中嶋 一斗 and 有田 輝},
booktitle = {日本ロボット学会学術講演会},
year = {2025},
}日本ロボット学会学術講演会 (RSJ),
2025
東京
東京
拡散モデルを用いた事後分布サンプリングによるLiDARデータのSim2Realドメイン変換
, , ,
, , ,
@inproceedings{%E6%8B%A1%E6%95%A3%E3%83%A2%E3%83%87%E3%83%AB%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E4%BA%8B%E5%BE%8C%E5%88%86%E5%B8%83%E3%82%B5%E3%83%B3%E3%83%97%E3%83%AA%E3%83%B3%E3%82%B0%E3%81%AB%E3%82%88%E3%82%8BLiDAR%E3%83%87%E3%83%BC%E3%82%BF%E3%81%AESim2Real%E3%83%89%E3%83%A1%E3%82%A4%E3%83%B3%E5%A4%89%E6%8F%9B,
title = {拡散モデルを用いた事後分布サンプリングによるLiDARデータのSim2Realドメイン変換},
author = {宮脇 智也 and 中嶋 一斗 and 岩下 友美 and 倉爪 亮},
booktitle = {画像の認識・理解シンポジウム},
year = {2025},
}画像の認識・理解シンポジウム (MIRU),
2025
京都
京都
条件付き拡散生成モデルを用いたLiDAR歩容点群系列の超解像
, , , ,
, , , ,
@inproceedings{%E6%9D%A1%E4%BB%B6%E4%BB%98%E3%81%8D%E6%8B%A1%E6%95%A3%E7%94%9F%E6%88%90%E3%83%A2%E3%83%87%E3%83%AB%E3%82%92%E7%94%A8%E3%81%84%E3%81%9FLiDAR%E6%AD%A9%E5%AE%B9%E7%82%B9%E7%BE%A4%E7%B3%BB%E5%88%97%E3%81%AE%E8%B6%85%E8%A7%A3%E5%83%8F,
title = {条件付き拡散生成モデルを用いたLiDAR歩容点群系列の超解像},
author = {アン・ジョンホ and 中嶋 一斗 and 吉野 弘毅 and 岩下 友美 and 倉爪 亮},
booktitle = {画像の認識・理解シンポジウム},
year = {2025},
}画像の認識・理解シンポジウム (MIRU),
2025
京都
京都
土木施工現場の状況把握のためのセンサポッド実証機の開発 -第3報 杭型センサポッドの改良と性能検証-
, , , ,
, , , ,
@inproceedings{%E5%9C%9F%E6%9C%A8%E6%96%BD%E5%B7%A5%E7%8F%BE%E5%A0%B4%E3%81%AE%E7%8A%B6%E6%B3%81%E6%8A%8A%E6%8F%A1%E3%81%AE%E3%81%9F%E3%82%81%E3%81%AE%E3%82%BB%E3%83%B3%E3%82%B5%E3%83%9D%E3%83%83%E3%83%89%E5%AE%9F%E8%A8%BC%E6%A9%9F%E3%81%AE%E9%96%8B%E7%99%BA-%E7%AC%AC3%E5%A0%B1-%E6%9D%AD%E5%9E%8B%E3%82%BB%E3%83%B3%E3%82%B5%E3%83%9D%E3%83%83%E3%83%89%E3%81%AE%E6%94%B9%E8%89%AF%E3%81%A8%E6%80%A7%E8%83%BD%E6%A4%9C%E8%A8%BC-,
title = {土木施工現場の状況把握のためのセンサポッド実証機の開発 -第3報 杭型センサポッドの改良と性能検証-},
author = {高野 智也 and 前田 龍一 and 松本 耕平 and 中嶋 一斗 and 倉爪 亮},
booktitle = {日本機械学会ロボティクスメカトロニクス講演会},
year = {2025},
}日本機械学会ロボティクスメカトロニクス講演会 (ROBOMECH),
2025
山形
山形
反射光量・ToF ハイブリッド型近接覚センサを用いた反射率に依らない各指同時接触
, , , ,
, , , ,
@inproceedings{%E5%8F%8D%E5%B0%84%E5%85%89%E9%87%8FToF-%E3%83%8F%E3%82%A4%E3%83%96%E3%83%AA%E3%83%83%E3%83%89%E5%9E%8B%E8%BF%91%E6%8E%A5%E8%A6%9A%E3%82%BB%E3%83%B3%E3%82%B5%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E5%8F%8D%E5%B0%84%E7%8E%87%E3%81%AB%E4%BE%9D%E3%82%89%E3%81%AA%E3%81%84%E5%90%84%E6%8C%87%E5%90%8C%E6%99%82%E6%8E%A5%E8%A7%A6,
title = {反射光量・ToF ハイブリッド型近接覚センサを用いた反射率に依らない各指同時接触},
author = {常盤 俊介 and 有田 輝 and 鈴木 陽介 and 中嶋 一斗 and 田原 健二},
booktitle = {日本機械学会ロボティクスメカトロニクス講演会},
year = {2025},
}日本機械学会ロボティクスメカトロニクス講演会 (ROBOMECH),
2025
山形
山形
釣糸人工筋肉アクチュエータの個体 / 試行ごとのばらつきをあらわす確率分布
, , ,
, , ,
@inproceedings{%E9%87%A3%E7%B3%B8%E4%BA%BA%E5%B7%A5%E7%AD%8B%E8%82%89%E3%82%A2%E3%82%AF%E3%83%81%E3%83%A5%E3%82%A8%E3%83%BC%E3%82%BF%E3%81%AE%E5%80%8B%E4%BD%93-/-%E8%A9%A6%E8%A1%8C%E3%81%94%E3%81%A8%E3%81%AE%E3%81%B0%E3%82%89%E3%81%A4%E3%81%8D%E3%82%92%E3%81%82%E3%82%89%E3%82%8F%E3%81%99%E7%A2%BA%E7%8E%87%E5%88%86%E5%B8%83,
title = {釣糸人工筋肉アクチュエータの個体 / 試行ごとのばらつきをあらわす確率分布},
author = {井手尾 壮介 and 有田 輝 and 中嶋 一斗 and 田原 健二},
booktitle = {日本機械学会ロボティクスメカトロニクス講演会},
year = {2025},
}日本機械学会ロボティクスメカトロニクス講演会 (ROBOMECH),
2025
山形
山形
多重仮想ダイナミクスに基づく力制御における設定パラメータと力センサの遅れに対する安定性の評価
, , ,
, , ,
@inproceedings{%E5%A4%9A%E9%87%8D%E4%BB%AE%E6%83%B3%E3%83%80%E3%82%A4%E3%83%8A%E3%83%9F%E3%82%AF%E3%82%B9%E3%81%AB%E5%9F%BA%E3%81%A5%E3%81%8F%E5%8A%9B%E5%88%B6%E5%BE%A1%E3%81%AB%E3%81%8A%E3%81%91%E3%82%8B%E8%A8%AD%E5%AE%9A%E3%83%91%E3%83%A9%E3%83%A1%E3%83%BC%E3%82%BF%E3%81%A8%E5%8A%9B%E3%82%BB%E3%83%B3%E3%82%B5%E3%81%AE%E9%81%85%E3%82%8C%E3%81%AB%E5%AF%BE%E3%81%99%E3%82%8B%E5%AE%89%E5%AE%9A%E6%80%A7%E3%81%AE%E8%A9%95%E4%BE%A1,
title = {多重仮想ダイナミクスに基づく力制御における設定パラメータと力センサの遅れに対する安定性の評価},
author = {兼清 幹大 and 有田 輝 and 中嶋 一斗 and 田原 健二},
booktitle = {日本機械学会ロボティクスメカトロニクス講演会},
year = {2025},
}日本機械学会ロボティクスメカトロニクス講演会 (ROBOMECH),
2025
山形
山形
近接覚センサによる高速計測情報を利用した低速マニピュレータの運動計画
, , ,
, , ,
@inproceedings{%E8%BF%91%E6%8E%A5%E8%A6%9A%E3%82%BB%E3%83%B3%E3%82%B5%E3%81%AB%E3%82%88%E3%82%8B%E9%AB%98%E9%80%9F%E8%A8%88%E6%B8%AC%E6%83%85%E5%A0%B1%E3%82%92%E5%88%A9%E7%94%A8%E3%81%97%E3%81%9F%E4%BD%8E%E9%80%9F%E3%83%9E%E3%83%8B%E3%83%94%E3%83%A5%E3%83%AC%E3%83%BC%E3%82%BF%E3%81%AE%E9%81%8B%E5%8B%95%E8%A8%88%E7%94%BB,
title = {近接覚センサによる高速計測情報を利用した低速マニピュレータの運動計画},
author = {是木 海里 and 有田 輝 and 中嶋 一斗 and 田原 健二},
booktitle = {日本機械学会ロボティクスメカトロニクス講演会},
year = {2025},
}日本機械学会ロボティクスメカトロニクス講演会 (ROBOMECH),
2025
山形
山形
多指ハンドで把持された物体の環境接触位置推定における精度検証
, , ,
, , ,
@inproceedings{%E5%A4%9A%E6%8C%87%E3%83%8F%E3%83%B3%E3%83%89%E3%81%A7%E6%8A%8A%E6%8C%81%E3%81%95%E3%82%8C%E3%81%9F%E7%89%A9%E4%BD%93%E3%81%AE%E7%92%B0%E5%A2%83%E6%8E%A5%E8%A7%A6%E4%BD%8D%E7%BD%AE%E6%8E%A8%E5%AE%9A%E3%81%AB%E3%81%8A%E3%81%91%E3%82%8B%E7%B2%BE%E5%BA%A6%E6%A4%9C%E8%A8%BC,
title = {多指ハンドで把持された物体の環境接触位置推定における精度検証},
author = {長澤 颯人 and 有田 輝 and 中嶋 一斗 and 田原 健二},
booktitle = {日本機械学会ロボティクスメカトロニクス講演会},
year = {2025},
}日本機械学会ロボティクスメカトロニクス講演会 (ROBOMECH),
2025
山形
山形
複数近接覚センサを用いた自己身体まで含む環境計測による形状柔軟多指ハンドの状態推定
, , , ,
, , , ,
@inproceedings{%E8%A4%87%E6%95%B0%E8%BF%91%E6%8E%A5%E8%A6%9A%E3%82%BB%E3%83%B3%E3%82%B5%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E8%87%AA%E5%B7%B1%E8%BA%AB%E4%BD%93%E3%81%BE%E3%81%A7%E5%90%AB%E3%82%80%E7%92%B0%E5%A2%83%E8%A8%88%E6%B8%AC%E3%81%AB%E3%82%88%E3%82%8B%E5%BD%A2%E7%8A%B6%E6%9F%94%E8%BB%9F%E5%A4%9A%E6%8C%87%E3%83%8F%E3%83%B3%E3%83%89%E3%81%AE%E7%8A%B6%E6%85%8B%E6%8E%A8%E5%AE%9A,
title = {複数近接覚センサを用いた自己身体まで含む環境計測による形状柔軟多指ハンドの状態推定},
author = {森田 雅人 and 岩尾 健吾 and 有田 輝 and 中嶋 一斗 and 田原 健二},
booktitle = {日本機械学会ロボティクスメカトロニクス講演会},
year = {2025},
}日本機械学会ロボティクスメカトロニクス講演会 (ROBOMECH),
2025
山形
山形
高分子と磁性体による粘弾性力を利用した逆可動関節モジュール
, , ,
, , ,
@inproceedings{%E9%AB%98%E5%88%86%E5%AD%90%E3%81%A8%E7%A3%81%E6%80%A7%E4%BD%93%E3%81%AB%E3%82%88%E3%82%8B%E7%B2%98%E5%BC%BE%E6%80%A7%E5%8A%9B%E3%82%92%E5%88%A9%E7%94%A8%E3%81%97%E3%81%9F%E9%80%86%E5%8F%AF%E5%8B%95%E9%96%A2%E7%AF%80%E3%83%A2%E3%82%B8%E3%83%A5%E3%83%BC%E3%83%AB,
title = {高分子と磁性体による粘弾性力を利用した逆可動関節モジュール},
author = {春名 一希 and 有田 輝 and 中嶋 一斗 and 田原 健二},
booktitle = {日本機械学会ロボティクスメカトロニクス講演会},
year = {2025},
}日本機械学会ロボティクスメカトロニクス講演会 (ROBOMECH),
2025
山形
山形
無段変速機構を持つ回転関節モジュールにおける環境接触前後の変速制御
, , ,
, , ,
@inproceedings{%E7%84%A1%E6%AE%B5%E5%A4%89%E9%80%9F%E6%A9%9F%E6%A7%8B%E3%82%92%E6%8C%81%E3%81%A4%E5%9B%9E%E8%BB%A2%E9%96%A2%E7%AF%80%E3%83%A2%E3%82%B8%E3%83%A5%E3%83%BC%E3%83%AB%E3%81%AB%E3%81%8A%E3%81%91%E3%82%8B%E7%92%B0%E5%A2%83%E6%8E%A5%E8%A7%A6%E5%89%8D%E5%BE%8C%E3%81%AE%E5%A4%89%E9%80%9F%E5%88%B6%E5%BE%A1,
title = {無段変速機構を持つ回転関節モジュールにおける環境接触前後の変速制御},
author = {古賀 祐矢 and 有田 輝 and 中嶋 一斗 and 田原 健二},
booktitle = {日本機械学会ロボティクスメカトロニクス講演会},
year = {2025},
}日本機械学会ロボティクスメカトロニクス講演会 (ROBOMECH),
2025
山形
山形
土木施工現場の状況把握のためのセンサポッド実証機の開発 -第2報 運搬・設置が容易で長時間駆動する杭型センサポッドの開発-
, , , ,
, , , ,
@inproceedings{%E5%9C%9F%E6%9C%A8%E6%96%BD%E5%B7%A5%E7%8F%BE%E5%A0%B4%E3%81%AE%E7%8A%B6%E6%B3%81%E6%8A%8A%E6%8F%A1%E3%81%AE%E3%81%9F%E3%82%81%E3%81%AE%E3%82%BB%E3%83%B3%E3%82%B5%E3%83%9D%E3%83%83%E3%83%89%E5%AE%9F%E8%A8%BC%E6%A9%9F%E3%81%AE%E9%96%8B%E7%99%BA-%E7%AC%AC2%E5%A0%B1-%E9%81%8B%E6%90%AC%E8%A8%AD%E7%BD%AE%E3%81%8C%E5%AE%B9%E6%98%93%E3%81%A7%E9%95%B7%E6%99%82%E9%96%93%E9%A7%86%E5%8B%95%E3%81%99%E3%82%8B%E6%9D%AD%E5%9E%8B%E3%82%BB%E3%83%B3%E3%82%B5%E3%83%9D%E3%83%83%E3%83%89%E3%81%AE%E9%96%8B%E7%99%BA-,
title = {土木施工現場の状況把握のためのセンサポッド実証機の開発 -第2報 運搬・設置が容易で長時間駆動する杭型センサポッドの開発-},
author = {高野 智也 and 前田 龍一 and 松本 耕平 and 中嶋 一斗 and 倉爪 亮},
booktitle = {計測自動制御学会システムインテグレーション部門講演会},
year = {2024},
}計測自動制御学会システムインテグレーション部門講演会 (SI),
2024
岩手
岩手
条件付きフローマッチングによるLiDARデータ生成モデルのサンプリング高速化
, , , ,
, , , ,
@inproceedings{%E6%9D%A1%E4%BB%B6%E4%BB%98%E3%81%8D%E3%83%95%E3%83%AD%E3%83%BC%E3%83%9E%E3%83%83%E3%83%81%E3%83%B3%E3%82%B0%E3%81%AB%E3%82%88%E3%82%8BLiDAR%E3%83%87%E3%83%BC%E3%82%BF%E7%94%9F%E6%88%90%E3%83%A2%E3%83%87%E3%83%AB%E3%81%AE%E3%82%B5%E3%83%B3%E3%83%97%E3%83%AA%E3%83%B3%E3%82%B0%E9%AB%98%E9%80%9F%E5%8C%96,
title = {条件付きフローマッチングによるLiDARデータ生成モデルのサンプリング高速化},
author = {中嶋 一斗 and 劉 瀟文 and 宮脇 智也 and 岩下 友美 and 倉爪 亮},
booktitle = {日本ロボット学会学術講演会},
year = {2024},
}日本ロボット学会学術講演会 (RSJ),
2024
大阪
大阪
拡散モデルの条件付き生成を用いたLiDARデータのSim2Realドメイン変換
, , , ,
, , , ,
@inproceedings{%E6%8B%A1%E6%95%A3%E3%83%A2%E3%83%87%E3%83%AB%E3%81%AE%E6%9D%A1%E4%BB%B6%E4%BB%98%E3%81%8D%E7%94%9F%E6%88%90%E3%82%92%E7%94%A8%E3%81%84%E3%81%9FLiDAR%E3%83%87%E3%83%BC%E3%82%BF%E3%81%AESim2Real%E3%83%89%E3%83%A1%E3%82%A4%E3%83%B3%E5%A4%89%E6%8F%9B,
title = {拡散モデルの条件付き生成を用いたLiDARデータのSim2Realドメイン変換},
author = {宮脇 智也 and 中嶋 一斗 and 劉 瀟文 and 岩下 友美 and 倉爪 亮},
booktitle = {画像の認識・理解シンポジウム},
year = {2024},
}画像の認識・理解シンポジウム (MIRU),
2024
熊本
熊本
RGB情報を活用したデータ拡張に基づく歩容認証
, , , ,
, , , ,
@inproceedings{RGB%E6%83%85%E5%A0%B1%E3%82%92%E6%B4%BB%E7%94%A8%E3%81%97%E3%81%9F%E3%83%87%E3%83%BC%E3%82%BF%E6%8B%A1%E5%BC%B5%E3%81%AB%E5%9F%BA%E3%81%A5%E3%81%8F%E6%AD%A9%E5%AE%B9%E8%AA%8D%E8%A8%BC,
title = {RGB情報を活用したデータ拡張に基づく歩容認証},
author = {吉野 弘毅 and 中嶋 一斗 and アン・ジョンホ and 岩下 友美 and 倉爪 亮},
booktitle = {画像の認識・理解シンポジウム},
year = {2024},
}画像の認識・理解シンポジウム (MIRU),
2024
熊本
熊本
拡散モデルを用いたLiDAR点群投影ベースの歩容映像復元
, , , ,
, , , ,
@inproceedings{%E6%8B%A1%E6%95%A3%E3%83%A2%E3%83%87%E3%83%AB%E3%82%92%E7%94%A8%E3%81%84%E3%81%9FLiDAR%E7%82%B9%E7%BE%A4%E6%8A%95%E5%BD%B1%E3%83%99%E3%83%BC%E3%82%B9%E3%81%AE%E6%AD%A9%E5%AE%B9%E6%98%A0%E5%83%8F%E5%BE%A9%E5%85%83,
title = {拡散モデルを用いたLiDAR点群投影ベースの歩容映像復元},
author = {アン・ジョンホ and 中嶋 一斗 and 吉野 弘毅 and 岩下 友美 and 倉爪 亮},
booktitle = {画像の認識・理解シンポジウム},
year = {2024},
}画像の認識・理解シンポジウム (MIRU),
2024
熊本
熊本
欠損ノイズが再現可能なSim2RealによるLiDARセグメンテーション
, , , ,
, , , ,
@inproceedings{%E6%AC%A0%E6%90%8D%E3%83%8E%E3%82%A4%E3%82%BA%E3%81%8C%E5%86%8D%E7%8F%BE%E5%8F%AF%E8%83%BD%E3%81%AASim2Real%E3%81%AB%E3%82%88%E3%82%8BLiDAR%E3%82%BB%E3%82%B0%E3%83%A1%E3%83%B3%E3%83%86%E3%83%BC%E3%82%B7%E3%83%A7%E3%83%B3,
title = {欠損ノイズが再現可能なSim2RealによるLiDARセグメンテーション},
author = {宮脇 智也 and 中嶋 一斗 and 劉 瀟文 and 岩下 友美 and 倉爪 亮},
booktitle = {日本機械学会ロボティクスメカトロニクス講演会},
year = {2024},
}日本機械学会ロボティクスメカトロニクス講演会 (ROBOMECH),
2024
宇都宮
宇都宮
拡散モデルを用いたリサンプリングによる3D LiDARデータの欠損補完
,
,
計測自動制御学会SI部門 若手奨励賞
@inproceedings{%E6%8B%A1%E6%95%A3%E3%83%A2%E3%83%87%E3%83%AB%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E3%83%AA%E3%82%B5%E3%83%B3%E3%83%97%E3%83%AA%E3%83%B3%E3%82%B0%E3%81%AB%E3%82%88%E3%82%8B3D-LiDAR%E3%83%87%E3%83%BC%E3%82%BF%E3%81%AE%E6%AC%A0%E6%90%8D%E8%A3%9C%E5%AE%8C,
title = {拡散モデルを用いたリサンプリングによる3D LiDARデータの欠損補完},
author = {中嶋 一斗 and 倉爪 亮},
booktitle = {ロボティクスシンポジア},
year = {2024},
}ロボティクスシンポジア,
2024
沖縄
沖縄
起立動作中に手すり・臀部・足底部にかかる力を用いた高齢者の体力測定データの評価
, , , , , , ,
, , , , , , ,
@inproceedings{%E8%B5%B7%E7%AB%8B%E5%8B%95%E4%BD%9C%E4%B8%AD%E3%81%AB%E6%89%8B%E3%81%99%E3%82%8A%E8%87%80%E9%83%A8%E8%B6%B3%E5%BA%95%E9%83%A8%E3%81%AB%E3%81%8B%E3%81%8B%E3%82%8B%E5%8A%9B%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E9%AB%98%E9%BD%A2%E8%80%85%E3%81%AE%E4%BD%93%E5%8A%9B%E6%B8%AC%E5%AE%9A%E3%83%87%E3%83%BC%E3%82%BF%E3%81%AE%E8%A9%95%E4%BE%A1,
title = {起立動作中に手すり・臀部・足底部にかかる力を用いた高齢者の体力測定データの評価},
author = {木原 諒也 and 安 琪 and 滝田 謙介 and 石黒 周 and 中山 和洋 and 三好 敢太 and 中嶋 一斗 and 倉爪 亮},
booktitle = {計測自動制御学会システムインテグレーション部門講演会},
year = {2023},
}計測自動制御学会システムインテグレーション部門講演会 (SI),
2023
新潟
新潟
土木施工現場の状況把握のためのセンサポッド実証機の開発
, , ,
, , ,
@inproceedings{%E5%9C%9F%E6%9C%A8%E6%96%BD%E5%B7%A5%E7%8F%BE%E5%A0%B4%E3%81%AE%E7%8A%B6%E6%B3%81%E6%8A%8A%E6%8F%A1%E3%81%AE%E3%81%9F%E3%82%81%E3%81%AE%E3%82%BB%E3%83%B3%E3%82%B5%E3%83%9D%E3%83%83%E3%83%89%E5%AE%9F%E8%A8%BC%E6%A9%9F%E3%81%AE%E9%96%8B%E7%99%BA,
title = {土木施工現場の状況把握のためのセンサポッド実証機の開発},
author = {高野 智也 and 松本 耕平 and 中嶋 一斗 and 倉爪 亮},
booktitle = {計測自動制御学会システムインテグレーション部門講演会},
year = {2023},
}計測自動制御学会システムインテグレーション部門講演会 (SI),
2023
新潟
新潟
土工現場用CPS プラットフォームROS2-TMS for Construction の開発 -第2報360 度カメラ映像を用いたCPS 可視化実験-
, , , ,
, , , ,
@inproceedings{%E5%9C%9F%E5%B7%A5%E7%8F%BE%E5%A0%B4%E7%94%A8CPS-%E3%83%97%E3%83%A9%E3%83%83%E3%83%88%E3%83%95%E3%82%A9%E3%83%BC%E3%83%A0ROS2-TMS-for-Construction-%E3%81%AE%E9%96%8B%E7%99%BA-%E7%AC%AC2%E5%A0%B1360-%E5%BA%A6%E3%82%AB%E3%83%A1%E3%83%A9%E6%98%A0%E5%83%8F%E3%82%92%E7%94%A8%E3%81%84%E3%81%9FCPS-%E5%8F%AF%E8%A6%96%E5%8C%96%E5%AE%9F%E9%A8%93-,
title = {土工現場用CPS プラットフォームROS2-TMS for Construction の開発 -第2報360 度カメラ映像を用いたCPS 可視化実験-},
author = {前田 龍一 and 高野 智也 and 松本 耕平 and 中嶋 一斗 and 倉爪 亮},
booktitle = {計測自動制御学会システムインテグレーション部門講演会},
year = {2023},
}計測自動制御学会システムインテグレーション部門講演会 (SI),
2023
新潟
新潟
LiDARデータの距離・反射強度・欠損分布を表現する深層生成モデルの開発
, , , ,
, , , ,
@inproceedings{LiDAR%E3%83%87%E3%83%BC%E3%82%BF%E3%81%AE%E8%B7%9D%E9%9B%A2%E5%8F%8D%E5%B0%84%E5%BC%B7%E5%BA%A6%E6%AC%A0%E6%90%8D%E5%88%86%E5%B8%83%E3%82%92%E8%A1%A8%E7%8F%BE%E3%81%99%E3%82%8B%E6%B7%B1%E5%B1%A4%E7%94%9F%E6%88%90%E3%83%A2%E3%83%87%E3%83%AB%E3%81%AE%E9%96%8B%E7%99%BA,
title = {LiDARデータの距離・反射強度・欠損分布を表現する深層生成モデルの開発},
author = {劉 瀟文 and 中嶋 一斗 and 宮脇 智也 and 岩下 友美 and 倉爪 亮},
booktitle = {計測自動制御学会システムインテグレーション部門講演会},
year = {2023},
}計測自動制御学会システムインテグレーション部門講演会 (SI),
2023
新潟
新潟
欠損確率の再現によるLiDAR Sim2Realの検討
, , , ,
, , , ,
@inproceedings{%E6%AC%A0%E6%90%8D%E7%A2%BA%E7%8E%87%E3%81%AE%E5%86%8D%E7%8F%BE%E3%81%AB%E3%82%88%E3%82%8BLiDAR-Sim2Real%E3%81%AE%E6%A4%9C%E8%A8%8E,
title = {欠損確率の再現によるLiDAR Sim2Realの検討},
author = {宮脇 智也 and 中嶋 一斗 and Xiaowen Liu and 岩下 友美 and 倉爪 亮},
booktitle = {日本ロボット学会学術講演会},
year = {2023},
}日本ロボット学会学術講演会 (RSJ),
2023
仙台
仙台
複数投影視点の適応的学習に基づく3D LiDARを用いた歩容認証
, , , ,
, , , ,
@inproceedings{%E8%A4%87%E6%95%B0%E6%8A%95%E5%BD%B1%E8%A6%96%E7%82%B9%E3%81%AE%E9%81%A9%E5%BF%9C%E7%9A%84%E5%AD%A6%E7%BF%92%E3%81%AB%E5%9F%BA%E3%81%A5%E3%81%8F3D-LiDAR%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E6%AD%A9%E5%AE%B9%E8%AA%8D%E8%A8%BC,
title = {複数投影視点の適応的学習に基づく3D LiDARを用いた歩容認証},
author = {安 正鎬 and 中嶋 一斗 and 吉野 弘毅 and 岩下 友美 and 倉爪 亮},
booktitle = {画像の認識・理解シンポジウム},
year = {2023},
}画像の認識・理解シンポジウム (MIRU),
2023
浜松
浜松
歩容特徴に基づく歩行者画像の新規生成を用いた歩容認証
, , , ,
, , , ,
@inproceedings{%E6%AD%A9%E5%AE%B9%E7%89%B9%E5%BE%B4%E3%81%AB%E5%9F%BA%E3%81%A5%E3%81%8F%E6%AD%A9%E8%A1%8C%E8%80%85%E7%94%BB%E5%83%8F%E3%81%AE%E6%96%B0%E8%A6%8F%E7%94%9F%E6%88%90%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E6%AD%A9%E5%AE%B9%E8%AA%8D%E8%A8%BC,
title = {歩容特徴に基づく歩行者画像の新規生成を用いた歩容認証},
author = {吉野 弘毅 and 中嶋 一斗 and 安 正鎬 and 岩下 友美 and 倉爪 亮},
booktitle = {画像の認識・理解シンポジウム},
year = {2023},
}画像の認識・理解シンポジウム (MIRU),
2023
浜松
浜松
土木工事における地盤剛性評価・安全管理のための分散型センサポッドの開発
, , , ,
, , , ,
@inproceedings{%E5%9C%9F%E6%9C%A8%E5%B7%A5%E4%BA%8B%E3%81%AB%E3%81%8A%E3%81%91%E3%82%8B%E5%9C%B0%E7%9B%A4%E5%89%9B%E6%80%A7%E8%A9%95%E4%BE%A1%E5%AE%89%E5%85%A8%E7%AE%A1%E7%90%86%E3%81%AE%E3%81%9F%E3%82%81%E3%81%AE%E5%88%86%E6%95%A3%E5%9E%8B%E3%82%BB%E3%83%B3%E3%82%B5%E3%83%9D%E3%83%83%E3%83%89%E3%81%AE%E9%96%8B%E7%99%BA,
title = {土木工事における地盤剛性評価・安全管理のための分散型センサポッドの開発},
author = {福田 健太郎 and 中嶋 一斗 and 前田 龍一 and 松本 耕平 and 倉爪 亮},
booktitle = {ロボティクスシンポジア},
year = {2023},
}ロボティクスシンポジア,
2023
和歌山
和歌山
3D LiDARセンサの点群投影方式による計測距離と歩行方向に対する歩容認証の頑健性評価
, , , ,
Paper
, , , ,
Paper
@inproceedings{3D-LiDAR%E3%82%BB%E3%83%B3%E3%82%B5%E3%81%AE%E7%82%B9%E7%BE%A4%E6%8A%95%E5%BD%B1%E6%96%B9%E5%BC%8F%E3%81%AB%E3%82%88%E3%82%8B%E8%A8%88%E6%B8%AC%E8%B7%9D%E9%9B%A2%E3%81%A8%E6%AD%A9%E8%A1%8C%E6%96%B9%E5%90%91%E3%81%AB%E5%AF%BE%E3%81%99%E3%82%8B%E6%AD%A9%E5%AE%B9%E8%AA%8D%E8%A8%BC%E3%81%AE%E9%A0%91%E5%81%A5%E6%80%A7%E8%A9%95%E4%BE%A1,
title = {3D LiDARセンサの点群投影方式による計測距離と歩行方向に対する歩容認証の頑健性評価},
author = {安 正鎬 and 中嶋 一斗 and 吉野 弘毅 and 岩下 友美 and 倉爪 亮},
booktitle = {日本ロボット学会学術講演会},
year = {2022},
}日本ロボット学会学術講演会 (RSJ),
2022
東京
東京
歩容特徴の抽出精度向上のための異なる人物間の特徴交換を用いた歩容認証
, , , ,
Paper
, , , ,
Paper
@inproceedings{%E6%AD%A9%E5%AE%B9%E7%89%B9%E5%BE%B4%E3%81%AE%E6%8A%BD%E5%87%BA%E7%B2%BE%E5%BA%A6%E5%90%91%E4%B8%8A%E3%81%AE%E3%81%9F%E3%82%81%E3%81%AE%E7%95%B0%E3%81%AA%E3%82%8B%E4%BA%BA%E7%89%A9%E9%96%93%E3%81%AE%E7%89%B9%E5%BE%B4%E4%BA%A4%E6%8F%9B%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E6%AD%A9%E5%AE%B9%E8%AA%8D%E8%A8%BC,
title = {歩容特徴の抽出精度向上のための異なる人物間の特徴交換を用いた歩容認証},
author = {吉野 弘毅 and 中嶋 一斗 and 安 正鎬 and 岩下 友美 and 倉爪 亮},
booktitle = {日本ロボット学会学術講演会},
year = {2022},
}日本ロボット学会学術講演会 (RSJ),
2022
東京
東京
ユマニチュード介護の「触れる」スキルの評価と被介護者の情動の変化の解明
, , ,
Paper
, , ,
Paper
@inproceedings{%E3%83%A6%E3%83%9E%E3%83%8B%E3%83%81%E3%83%A5%E3%83%BC%E3%83%89%E4%BB%8B%E8%AD%B7%E3%81%AE%E8%A7%A6%E3%82%8C%E3%82%8B%E3%82%B9%E3%82%AD%E3%83%AB%E3%81%AE%E8%A9%95%E4%BE%A1%E3%81%A8%E8%A2%AB%E4%BB%8B%E8%AD%B7%E8%80%85%E3%81%AE%E6%83%85%E5%8B%95%E3%81%AE%E5%A4%89%E5%8C%96%E3%81%AE%E8%A7%A3%E6%98%8E,
title = {ユマニチュード介護の「触れる」スキルの評価と被介護者の情動の変化の解明},
author = {安積 諒馬 and 安 琪 and 中嶋 一斗 and 倉爪 亮},
booktitle = {日本ロボット学会学術講演会},
year = {2022},
}日本ロボット学会学術講演会 (RSJ),
2022
東京
東京
多点同期振動データの波形歪みに基づく地盤剛性評価手法の提案
, ,
, ,
@inproceedings{%E5%A4%9A%E7%82%B9%E5%90%8C%E6%9C%9F%E6%8C%AF%E5%8B%95%E3%83%87%E3%83%BC%E3%82%BF%E3%81%AE%E6%B3%A2%E5%BD%A2%E6%AD%AA%E3%81%BF%E3%81%AB%E5%9F%BA%E3%81%A5%E3%81%8F%E5%9C%B0%E7%9B%A4%E5%89%9B%E6%80%A7%E8%A9%95%E4%BE%A1%E6%89%8B%E6%B3%95%E3%81%AE%E6%8F%90%E6%A1%88,
title = {多点同期振動データの波形歪みに基づく地盤剛性評価手法の提案},
author = {福田 健太郎 and 中嶋 一斗 and 倉爪 亮},
booktitle = {建設ロボットシンポジウム},
year = {2022},
}建設ロボットシンポジウム,
2022
東京
東京
距離画像の陰的表現に基づくGANを用いた3D LiDARデータのドメイン適応
, ,
, ,
@inproceedings{%E8%B7%9D%E9%9B%A2%E7%94%BB%E5%83%8F%E3%81%AE%E9%99%B0%E7%9A%84%E8%A1%A8%E7%8F%BE%E3%81%AB%E5%9F%BA%E3%81%A5%E3%81%8FGAN%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F3D-LiDAR%E3%83%87%E3%83%BC%E3%82%BF%E3%81%AE%E3%83%89%E3%83%A1%E3%82%A4%E3%83%B3%E9%81%A9%E5%BF%9C,
title = {距離画像の陰的表現に基づくGANを用いた3D LiDARデータのドメイン適応},
author = {中嶋 一斗 and 岩下 友美 and 倉爪 亮},
booktitle = {画像の認識・理解シンポジウム},
year = {2022},
}画像の認識・理解シンポジウム (MIRU),
2022
姫路
姫路
3D LiDAR点群の投影画像を用いた計測距離と歩行方向の変化に頑健な歩容認証
, , , ,
, , , ,
@inproceedings{3D-LiDAR%E7%82%B9%E7%BE%A4%E3%81%AE%E6%8A%95%E5%BD%B1%E7%94%BB%E5%83%8F%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E8%A8%88%E6%B8%AC%E8%B7%9D%E9%9B%A2%E3%81%A8%E6%AD%A9%E8%A1%8C%E6%96%B9%E5%90%91%E3%81%AE%E5%A4%89%E5%8C%96%E3%81%AB%E9%A0%91%E5%81%A5%E3%81%AA%E6%AD%A9%E5%AE%B9%E8%AA%8D%E8%A8%BC,
title = {3D LiDAR点群の投影画像を用いた計測距離と歩行方向の変化に頑健な歩容認証},
author = {安 正鎬 and 中嶋 一斗 and 吉野 弘毅 and 岩下 友美 and 倉爪 亮},
booktitle = {画像の認識・理解シンポジウム},
year = {2022},
}画像の認識・理解シンポジウム (MIRU),
2022
姫路
姫路
歩容特徴の抽出精度向上のための同一人物間の特徴交換を用いた歩容認証
, , , ,
, , , ,
@inproceedings{%E6%AD%A9%E5%AE%B9%E7%89%B9%E5%BE%B4%E3%81%AE%E6%8A%BD%E5%87%BA%E7%B2%BE%E5%BA%A6%E5%90%91%E4%B8%8A%E3%81%AE%E3%81%9F%E3%82%81%E3%81%AE%E5%90%8C%E4%B8%80%E4%BA%BA%E7%89%A9%E9%96%93%E3%81%AE%E7%89%B9%E5%BE%B4%E4%BA%A4%E6%8F%9B%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E6%AD%A9%E5%AE%B9%E8%AA%8D%E8%A8%BC,
title = {歩容特徴の抽出精度向上のための同一人物間の特徴交換を用いた歩容認証},
author = {吉野 弘毅 and 中嶋 一斗 and 安 正鎬 and 岩下 友美 and 倉爪 亮},
booktitle = {画像の認識・理解シンポジウム},
year = {2022},
}画像の認識・理解シンポジウム (MIRU),
2022
姫路
姫路
レトロフィット型バックホウ遠隔操縦システムの開発
, ,
, ,
@inproceedings{%E3%83%AC%E3%83%88%E3%83%AD%E3%83%95%E3%82%A3%E3%83%83%E3%83%88%E5%9E%8B%E3%83%90%E3%83%83%E3%82%AF%E3%83%9B%E3%82%A6%E9%81%A0%E9%9A%94%E6%93%8D%E7%B8%A6%E3%82%B7%E3%82%B9%E3%83%86%E3%83%A0%E3%81%AE%E9%96%8B%E7%99%BA,
title = {レトロフィット型バックホウ遠隔操縦システムの開発},
author = {西浦 悠生 and 中嶋 一斗 and 倉爪 亮},
booktitle = {日本機械学会ロボティクスメカトロニクス講演会},
year = {2022},
}日本機械学会ロボティクスメカトロニクス講演会 (ROBOMECH),
2022
札幌
札幌
転圧地盤評価のための分散型センサポッドの開発 ―第2 報多点同期振動データの波形歪みに基づく地盤剛性の定量化―
, ,
, ,
@inproceedings{%E8%BB%A2%E5%9C%A7%E5%9C%B0%E7%9B%A4%E8%A9%95%E4%BE%A1%E3%81%AE%E3%81%9F%E3%82%81%E3%81%AE%E5%88%86%E6%95%A3%E5%9E%8B%E3%82%BB%E3%83%B3%E3%82%B5%E3%83%9D%E3%83%83%E3%83%89%E3%81%AE%E9%96%8B%E7%99%BA-%E7%AC%AC2-%E5%A0%B1%E5%A4%9A%E7%82%B9%E5%90%8C%E6%9C%9F%E6%8C%AF%E5%8B%95%E3%83%87%E3%83%BC%E3%82%BF%E3%81%AE%E6%B3%A2%E5%BD%A2%E6%AD%AA%E3%81%BF%E3%81%AB%E5%9F%BA%E3%81%A5%E3%81%8F%E5%9C%B0%E7%9B%A4%E5%89%9B%E6%80%A7%E3%81%AE%E5%AE%9A%E9%87%8F%E5%8C%96,
title = {転圧地盤評価のための分散型センサポッドの開発 ―第2 報多点同期振動データの波形歪みに基づく地盤剛性の定量化―},
author = {福田 健太郎 and 中嶋 一斗 and 倉爪 亮},
booktitle = {日本機械学会ロボティクスメカトロニクス講演会},
year = {2022},
}日本機械学会ロボティクスメカトロニクス講演会 (ROBOMECH),
2022
札幌
札幌
陰的画像表現を用いた3D LiDARデータの深層生成モデリング
, ,
, ,
@inproceedings{%E9%99%B0%E7%9A%84%E7%94%BB%E5%83%8F%E8%A1%A8%E7%8F%BE%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F3D-LiDAR%E3%83%87%E3%83%BC%E3%82%BF%E3%81%AE%E6%B7%B1%E5%B1%A4%E7%94%9F%E6%88%90%E3%83%A2%E3%83%87%E3%83%AA%E3%83%B3%E3%82%B0,
title = {陰的画像表現を用いた3D LiDARデータの深層生成モデリング},
author = {中嶋 一斗 and 岩下 友美 and 倉爪 亮},
booktitle = {ロボティクスシンポジア},
year = {2022},
}ロボティクスシンポジア,
2022
オンライン
オンライン
転圧地盤評価のための分散型センサポッドの開発
, ,
, ,
@inproceedings{%E8%BB%A2%E5%9C%A7%E5%9C%B0%E7%9B%A4%E8%A9%95%E4%BE%A1%E3%81%AE%E3%81%9F%E3%82%81%E3%81%AE%E5%88%86%E6%95%A3%E5%9E%8B%E3%82%BB%E3%83%B3%E3%82%B5%E3%83%9D%E3%83%83%E3%83%89%E3%81%AE%E9%96%8B%E7%99%BA,
title = {転圧地盤評価のための分散型センサポッドの開発},
author = {福田 健太郎 and 中嶋 一斗 and 倉爪 亮},
booktitle = {計測自動制御学会システムインテグレーション部門講演会},
year = {2021},
}計測自動制御学会システムインテグレーション部門講演会 (SI),
2021
オンライン
オンライン
多層3D LiDARとLSTMを用いた距離・点群密度変化に頑健な歩容認証 (第2報)
, , ,
Paper
, , ,
Paper
@inproceedings{%E5%A4%9A%E5%B1%A43D-LiDAR%E3%81%A8LSTM%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E8%B7%9D%E9%9B%A2%E7%82%B9%E7%BE%A4%E5%AF%86%E5%BA%A6%E5%A4%89%E5%8C%96%E3%81%AB%E9%A0%91%E5%81%A5%E3%81%AA%E6%AD%A9%E5%AE%B9%E8%AA%8D%E8%A8%BC-%E7%AC%AC2%E5%A0%B1,
title = {多層3D LiDARとLSTMを用いた距離・点群密度変化に頑健な歩容認証 (第2報)},
author = {安 正鎬 and 山田 弘幸 and 中嶋 一斗 and 倉爪 亮},
booktitle = {日本ロボット学会学術講演会},
year = {2021},
}日本ロボット学会学術講演会 (RSJ),
2021
オンライン
オンライン
同一人物間の歩容特徴交換によるデータ拡張を用いた歩容認証
, , ,
Paper
, , ,
Paper
@inproceedings{%E5%90%8C%E4%B8%80%E4%BA%BA%E7%89%A9%E9%96%93%E3%81%AE%E6%AD%A9%E5%AE%B9%E7%89%B9%E5%BE%B4%E4%BA%A4%E6%8F%9B%E3%81%AB%E3%82%88%E3%82%8B%E3%83%87%E3%83%BC%E3%82%BF%E6%8B%A1%E5%BC%B5%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E6%AD%A9%E5%AE%B9%E8%AA%8D%E8%A8%BC,
title = {同一人物間の歩容特徴交換によるデータ拡張を用いた歩容認証},
author = {吉野 弘毅 and 中嶋 一斗 and 岩下 友美 and 倉爪 亮},
booktitle = {日本ロボット学会学術講演会},
year = {2021},
}日本ロボット学会学術講演会 (RSJ),
2021
オンライン
オンライン
ユマニチュードによる立ち上がり動作介助における介助者と被介助者の身体にかかる反力の解析
, , ,
Paper
, , ,
Paper
@inproceedings{%E3%83%A6%E3%83%9E%E3%83%8B%E3%83%81%E3%83%A5%E3%83%BC%E3%83%89%E3%81%AB%E3%82%88%E3%82%8B%E7%AB%8B%E3%81%A1%E4%B8%8A%E3%81%8C%E3%82%8A%E5%8B%95%E4%BD%9C%E4%BB%8B%E5%8A%A9%E3%81%AB%E3%81%8A%E3%81%91%E3%82%8B%E4%BB%8B%E5%8A%A9%E8%80%85%E3%81%A8%E8%A2%AB%E4%BB%8B%E5%8A%A9%E8%80%85%E3%81%AE%E8%BA%AB%E4%BD%93%E3%81%AB%E3%81%8B%E3%81%8B%E3%82%8B%E5%8F%8D%E5%8A%9B%E3%81%AE%E8%A7%A3%E6%9E%90,
title = {ユマニチュードによる立ち上がり動作介助における介助者と被介助者の身体にかかる反力の解析},
author = {田中 彰人 and 安 琪 and 中嶋 一斗 and 倉爪 亮},
booktitle = {日本ロボット学会学術講演会},
year = {2021},
}日本ロボット学会学術講演会 (RSJ),
2021
オンライン
オンライン
確率的欠損表現を用いたLiDARデータの生成モデリング
,
,
@inproceedings{%E7%A2%BA%E7%8E%87%E7%9A%84%E6%AC%A0%E6%90%8D%E8%A1%A8%E7%8F%BE%E3%82%92%E7%94%A8%E3%81%84%E3%81%9FLiDAR%E3%83%87%E3%83%BC%E3%82%BF%E3%81%AE%E7%94%9F%E6%88%90%E3%83%A2%E3%83%87%E3%83%AA%E3%83%B3%E3%82%B0,
title = {確率的欠損表現を用いたLiDARデータの生成モデリング},
author = {中嶋 一斗 and 倉爪 亮},
booktitle = {画像の認識・理解シンポジウム},
year = {2021},
}画像の認識・理解シンポジウム (MIRU),
2021
オンライン
オンライン
多層3D LiDARとLSTMを用いた距離・点群密度変化に頑健な歩容認証
, , ,
Paper
, , ,
Paper
@inproceedings{%E5%A4%9A%E5%B1%A43D-LiDAR%E3%81%A8LSTM%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E8%B7%9D%E9%9B%A2%E7%82%B9%E7%BE%A4%E5%AF%86%E5%BA%A6%E5%A4%89%E5%8C%96%E3%81%AB%E9%A0%91%E5%81%A5%E3%81%AA%E6%AD%A9%E5%AE%B9%E8%AA%8D%E8%A8%BC,
title = {多層3D LiDARとLSTMを用いた距離・点群密度変化に頑健な歩容認証},
author = {Jeongho Ahn and 山田 弘幸 and 中嶋 一斗 and 倉爪 亮},
booktitle = {日本ロボット学会学術講演会},
year = {2020},
}日本ロボット学会学術講演会 (RSJ),
2020
オンライン
オンライン
LiDAR点群アップサンプリングのための欠損と反射率を考慮した深度マップ超解像
, ,
, ,
@inproceedings{LiDAR%E7%82%B9%E7%BE%A4%E3%82%A2%E3%83%83%E3%83%97%E3%82%B5%E3%83%B3%E3%83%97%E3%83%AA%E3%83%B3%E3%82%B0%E3%81%AE%E3%81%9F%E3%82%81%E3%81%AE%E6%AC%A0%E6%90%8D%E3%81%A8%E5%8F%8D%E5%B0%84%E7%8E%87%E3%82%92%E8%80%83%E6%85%AE%E3%81%97%E3%81%9F%E6%B7%B1%E5%BA%A6%E3%83%9E%E3%83%83%E3%83%97%E8%B6%85%E8%A7%A3%E5%83%8F,
title = {LiDAR点群アップサンプリングのための欠損と反射率を考慮した深度マップ超解像},
author = {Qiongyu Li and 中嶋 一斗 and 倉爪 亮},
booktitle = {画像の認識・理解シンポジウム},
year = {2020},
}画像の認識・理解シンポジウム (MIRU),
2020
オンライン
オンライン
同一人物間の歩容特徴交換によるデータ拡張を用いた歩容認証
, , ,
, , ,
@inproceedings{%E5%90%8C%E4%B8%80%E4%BA%BA%E7%89%A9%E9%96%93%E3%81%AE%E6%AD%A9%E5%AE%B9%E7%89%B9%E5%BE%B4%E4%BA%A4%E6%8F%9B%E3%81%AB%E3%82%88%E3%82%8B%E3%83%87%E3%83%BC%E3%82%BF%E6%8B%A1%E5%BC%B5%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E6%AD%A9%E5%AE%B9%E8%AA%8D%E8%A8%BC,
title = {同一人物間の歩容特徴交換によるデータ拡張を用いた歩容認証},
author = {吉野 弘毅 and 中嶋 一斗 and 岩下 友美 and 倉爪 亮},
booktitle = {画像の認識・理解シンポジウム},
year = {2020},
}画像の認識・理解シンポジウム (MIRU),
2020
オンライン
オンライン
レーザ反射画像を用いた機械学習による路面判別
, ,
, ,
@inproceedings{%E3%83%AC%E3%83%BC%E3%82%B6%E5%8F%8D%E5%B0%84%E7%94%BB%E5%83%8F%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E6%A9%9F%E6%A2%B0%E5%AD%A6%E7%BF%92%E3%81%AB%E3%82%88%E3%82%8B%E8%B7%AF%E9%9D%A2%E5%88%A4%E5%88%A5,
title = {レーザ反射画像を用いた機械学習による路面判別},
author = {Beomjoon Lee and 中嶋 一斗 and 倉爪 亮},
booktitle = {計測自動制御学会システムインテグレーション部門講演会},
year = {2019},
}計測自動制御学会システムインテグレーション部門講演会 (SI),
2019
高松
高松
第四人称視点に基づく情報構造化空間の状況説明文生成 第2報 顕著領域クラスタリングによる視点間アテンションの統合
,
Paper
,
Paper
@inproceedings{%E7%AC%AC%E5%9B%9B%E4%BA%BA%E7%A7%B0%E8%A6%96%E7%82%B9%E3%81%AB%E5%9F%BA%E3%81%A5%E3%81%8F%E6%83%85%E5%A0%B1%E6%A7%8B%E9%80%A0%E5%8C%96%E7%A9%BA%E9%96%93%E3%81%AE%E7%8A%B6%E6%B3%81%E8%AA%AC%E6%98%8E%E6%96%87%E7%94%9F%E6%88%90-%E7%AC%AC2%E5%A0%B1-%E9%A1%95%E8%91%97%E9%A0%98%E5%9F%9F%E3%82%AF%E3%83%A9%E3%82%B9%E3%82%BF%E3%83%AA%E3%83%B3%E3%82%B0%E3%81%AB%E3%82%88%E3%82%8B%E8%A6%96%E7%82%B9%E9%96%93%E3%82%A2%E3%83%86%E3%83%B3%E3%82%B7%E3%83%A7%E3%83%B3%E3%81%AE%E7%B5%B1%E5%90%88,
title = {第四人称視点に基づく情報構造化空間の状況説明文生成 第2報 顕著領域クラスタリングによる視点間アテンションの統合},
author = {中嶋 一斗 and 倉爪 亮},
booktitle = {日本ロボット学会学術講演会},
year = {2019},
}日本ロボット学会学術講演会 (RSJ),
2019
東京
東京
第四人称視点に基づく情報構造化空間の状況説明文生成
,
Paper
,
Paper
@inproceedings{%E7%AC%AC%E5%9B%9B%E4%BA%BA%E7%A7%B0%E8%A6%96%E7%82%B9%E3%81%AB%E5%9F%BA%E3%81%A5%E3%81%8F%E6%83%85%E5%A0%B1%E6%A7%8B%E9%80%A0%E5%8C%96%E7%A9%BA%E9%96%93%E3%81%AE%E7%8A%B6%E6%B3%81%E8%AA%AC%E6%98%8E%E6%96%87%E7%94%9F%E6%88%90,
title = {第四人称視点に基づく情報構造化空間の状況説明文生成},
author = {中嶋 一斗 and 倉爪 亮},
booktitle = {日本ロボット学会学術講演会},
year = {2018},
}日本ロボット学会学術講演会 (RSJ),
2018
愛知
愛知
異なる画像間差分を入力とするCNNを用いた低解像度画像に頑強な歩容認証
, , , ,
, , , ,
@inproceedings{%E7%95%B0%E3%81%AA%E3%82%8B%E7%94%BB%E5%83%8F%E9%96%93%E5%B7%AE%E5%88%86%E3%82%92%E5%85%A5%E5%8A%9B%E3%81%A8%E3%81%99%E3%82%8BCNN%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E4%BD%8E%E8%A7%A3%E5%83%8F%E5%BA%A6%E7%94%BB%E5%83%8F%E3%81%AB%E9%A0%91%E5%BC%B7%E3%81%AA%E6%AD%A9%E5%AE%B9%E8%AA%8D%E8%A8%BC,
title = {異なる画像間差分を入力とするCNNを用いた低解像度画像に頑強な歩容認証},
author = {瀬戸口 直輝 and 中嶋 一斗 and 呉 桐 and 岩下 友美 and 倉爪 亮},
booktitle = {画像の認識・理解シンポジウム},
year = {2018},
}画像の認識・理解シンポジウム (MIRU),
2018
札幌
札幌
画像間差分とCNNを用いた低解像度画像による歩容認証
, , , ,
Paper
, , , ,
Paper
@inproceedings{%E7%94%BB%E5%83%8F%E9%96%93%E5%B7%AE%E5%88%86%E3%81%A8CNN%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E4%BD%8E%E8%A7%A3%E5%83%8F%E5%BA%A6%E7%94%BB%E5%83%8F%E3%81%AB%E3%82%88%E3%82%8B%E6%AD%A9%E5%AE%B9%E8%AA%8D%E8%A8%BC,
title = {画像間差分とCNNを用いた低解像度画像による歩容認証},
author = {瀬戸口 直輝 and 中嶋 一斗 and 呉 桐 and 岩下 友美 and 倉爪 亮},
booktitle = {日本機械学会ロボティクスメカトロニクス講演会},
year = {2018},
}日本機械学会ロボティクスメカトロニクス講演会 (ROBOMECH),
2018
北九州
北九州
レーザ反射画像を用いた機械学習による路面判別
, , ,
, , ,
@inproceedings{%E3%83%AC%E3%83%BC%E3%82%B6%E5%8F%8D%E5%B0%84%E7%94%BB%E5%83%8F%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E6%A9%9F%E6%A2%B0%E5%AD%A6%E7%BF%92%E3%81%AB%E3%82%88%E3%82%8B%E8%B7%AF%E9%9D%A2%E5%88%A4%E5%88%A5,
title = {レーザ反射画像を用いた機械学習による路面判別},
author = {南 承佑 and 中嶋 一斗 and 倉爪 亮 and 関口 正一},
booktitle = {計測自動制御学会システムインテグレーション部門講演会},
year = {2017},
}計測自動制御学会システムインテグレーション部門講演会 (SI),
2017
仙台
仙台
マルチモーダル全方位画像の共起性と循環性を考慮した畳込み特徴学習による一般屋外環境識別
, ,
Paper
, ,
Paper
@inproceedings{%E3%83%9E%E3%83%AB%E3%83%81%E3%83%A2%E3%83%BC%E3%83%80%E3%83%AB%E5%85%A8%E6%96%B9%E4%BD%8D%E7%94%BB%E5%83%8F%E3%81%AE%E5%85%B1%E8%B5%B7%E6%80%A7%E3%81%A8%E5%BE%AA%E7%92%B0%E6%80%A7%E3%82%92%E8%80%83%E6%85%AE%E3%81%97%E3%81%9F%E7%95%B3%E8%BE%BC%E3%81%BF%E7%89%B9%E5%BE%B4%E5%AD%A6%E7%BF%92%E3%81%AB%E3%82%88%E3%82%8B%E4%B8%80%E8%88%AC%E5%B1%8B%E5%A4%96%E7%92%B0%E5%A2%83%E8%AD%98%E5%88%A5,
title = {マルチモーダル全方位画像の共起性と循環性を考慮した畳込み特徴学習による一般屋外環境識別},
author = {中嶋 一斗 and 河村 晃宏 and 倉爪 亮},
booktitle = {日本ロボット学会学術講演会},
year = {2017},
}日本ロボット学会学術講演会 (RSJ),
2017
埼玉
埼玉
第四人称キャプショニング:相補性を有する分散視覚を用いたヒト-ロボット共生空間の状況記述
, , ,
, , ,
学生奨励賞
@inproceedings{%E7%AC%AC%E5%9B%9B%E4%BA%BA%E7%A7%B0%E3%82%AD%E3%83%A3%E3%83%97%E3%82%B7%E3%83%A7%E3%83%8B%E3%83%B3%E3%82%B0%E7%9B%B8%E8%A3%9C%E6%80%A7%E3%82%92%E6%9C%89%E3%81%99%E3%82%8B%E5%88%86%E6%95%A3%E8%A6%96%E8%A6%9A%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E3%83%92%E3%83%88-%E3%83%AD%E3%83%9C%E3%83%83%E3%83%88%E5%85%B1%E7%94%9F%E7%A9%BA%E9%96%93%E3%81%AE%E7%8A%B6%E6%B3%81%E8%A8%98%E8%BF%B0,
title = {第四人称キャプショニング:相補性を有する分散視覚を用いたヒト-ロボット共生空間の状況記述},
author = {中嶋 一斗 and 岩下 友美 and 河村 晃宏 and 倉爪 亮},
booktitle = {画像の認識・理解シンポジウム},
year = {2017},
}画像の認識・理解シンポジウム (MIRU),
2017
広島
広島
正負フレーム間差分を用いた深層学習による歩容認証
, , , ,
, , , ,
@inproceedings{%E6%AD%A3%E8%B2%A0%E3%83%95%E3%83%AC%E3%83%BC%E3%83%A0%E9%96%93%E5%B7%AE%E5%88%86%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E6%B7%B1%E5%B1%A4%E5%AD%A6%E7%BF%92%E3%81%AB%E3%82%88%E3%82%8B%E6%AD%A9%E5%AE%B9%E8%AA%8D%E8%A8%BC,
title = {正負フレーム間差分を用いた深層学習による歩容認証},
author = {呉 桐 and 中嶋 一斗 and 瀬戸口 直輝 and 岩下 友美 and 倉爪 亮},
booktitle = {画像の認識・理解シンポジウム},
year = {2017},
}画像の認識・理解シンポジウム (MIRU),
2017
広島
広島
Previewed Reality 情報構造化空間における近未来可視化システム ―没入感ディスプレイを用いたシステム構築と実験―
, , ,
Paper
, , ,
Paper
@inproceedings{Previewed-Reality-%E6%83%85%E5%A0%B1%E6%A7%8B%E9%80%A0%E5%8C%96%E7%A9%BA%E9%96%93%E3%81%AB%E3%81%8A%E3%81%91%E3%82%8B%E8%BF%91%E6%9C%AA%E6%9D%A5%E5%8F%AF%E8%A6%96%E5%8C%96%E3%82%B7%E3%82%B9%E3%83%86%E3%83%A0-%E6%B2%A1%E5%85%A5%E6%84%9F%E3%83%87%E3%82%A3%E3%82%B9%E3%83%97%E3%83%AC%E3%82%A4%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E3%82%B7%E3%82%B9%E3%83%86%E3%83%A0%E6%A7%8B%E7%AF%89%E3%81%A8%E5%AE%9F%E9%A8%93,
title = {Previewed Reality 情報構造化空間における近未来可視化システム ―没入感ディスプレイを用いたシステム構築と実験―},
author = {堀川 雄太 and 中嶋 一斗 and 河村 晃宏 and 倉爪 亮},
booktitle = {日本機械学会ロボティクスメカトロニクス講演会},
year = {2017},
}日本機械学会ロボティクスメカトロニクス講演会 (ROBOMECH),
2017
福島
福島
全周距離画像を入力とするConvolutional Neural Networkを用いた屋外環境の種別推定
, ,
, ,
@inproceedings{%E5%85%A8%E5%91%A8%E8%B7%9D%E9%9B%A2%E7%94%BB%E5%83%8F%E3%82%92%E5%85%A5%E5%8A%9B%E3%81%A8%E3%81%99%E3%82%8BConvolutional-Neural-Network%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E5%B1%8B%E5%A4%96%E7%92%B0%E5%A2%83%E3%81%AE%E7%A8%AE%E5%88%A5%E6%8E%A8%E5%AE%9A,
title = {全周距離画像を入力とするConvolutional Neural Networkを用いた屋外環境の種別推定},
author = {中嶋 一斗 and Oscar Martinez Mozos and 倉爪 亮},
booktitle = {ロボティクスシンポジア},
year = {2017},
}ロボティクスシンポジア,
2017
群馬
群馬
情報構造化環境におけるスマートグラスとFaster R-CNNを用いた日常物品登録システムの開発
, , ,
Paper
, , ,
Paper
@inproceedings{%E6%83%85%E5%A0%B1%E6%A7%8B%E9%80%A0%E5%8C%96%E7%92%B0%E5%A2%83%E3%81%AB%E3%81%8A%E3%81%91%E3%82%8B%E3%82%B9%E3%83%9E%E3%83%BC%E3%83%88%E3%82%B0%E3%83%A9%E3%82%B9%E3%81%A8Faster-R-CNN%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%E6%97%A5%E5%B8%B8%E7%89%A9%E5%93%81%E7%99%BB%E9%8C%B2%E3%82%B7%E3%82%B9%E3%83%86%E3%83%A0%E3%81%AE%E9%96%8B%E7%99%BA,
title = {情報構造化環境におけるスマートグラスとFaster R-CNNを用いた日常物品登録システムの開発},
author = {中嶋 一斗 and 岩下 友美 and 高嶺 朝理 and 倉爪 亮},
booktitle = {日本機械学会ロボティクスメカトロニクス講演会},
year = {2016},
}日本機械学会ロボティクスメカトロニクス講演会 (ROBOMECH),
2016
横浜
横浜
サービスロボットのための第4人称センシングの提案
, , , ,
, , , ,
@inproceedings{%E3%82%B5%E3%83%BC%E3%83%93%E3%82%B9%E3%83%AD%E3%83%9C%E3%83%83%E3%83%88%E3%81%AE%E3%81%9F%E3%82%81%E3%81%AE%E7%AC%AC4%E4%BA%BA%E7%A7%B0%E3%82%BB%E3%83%B3%E3%82%B7%E3%83%B3%E3%82%B0%E3%81%AE%E6%8F%90%E6%A1%88,
title = {サービスロボットのための第4人称センシングの提案},
author = {中嶋 一斗 and 岩下 友美 and ピョ ユンソク and 高嶺 朝理 and 倉爪 亮},
booktitle = {画像の認識・理解シンポジウム},
year = {2015},
}画像の認識・理解シンポジウム (MIRU),
2015
大阪
大阪
サービスロボットのための第4人称センシングの提案
, , , ,
, , , ,
@inproceedings{%E3%82%B5%E3%83%BC%E3%83%93%E3%82%B9%E3%83%AD%E3%83%9C%E3%83%83%E3%83%88%E3%81%AE%E3%81%9F%E3%82%81%E3%81%AE%E7%AC%AC4%E4%BA%BA%E7%A7%B0%E3%82%BB%E3%83%B3%E3%82%B7%E3%83%B3%E3%82%B0%E3%81%AE%E6%8F%90%E6%A1%88,
title = {サービスロボットのための第4人称センシングの提案},
author = {中嶋 一斗 and 岩下 友美 and ピョ ユンソク and 高嶺 朝理 and 倉爪 亮},
booktitle = {日本機械学会ロボティクスメカトロニクス講演会},
year = {2015},
}日本機械学会ロボティクスメカトロニクス講演会 (ROBOMECH),
2015
京都
京都